Брайант Р. Э., О'Халларон Д. Р Компьютерные системы. Архитектура и программирование 2022
- веб-страница книги
- CS:APP3e Веб-дополнения
- Сайт инструктора CS:APP3e
- Студенческий сайт CS:APP3e
- lecture-code

Часть I Структура программы и ее выполнение
- Глава 1. Экскурс в компьютерные системы
- Глава 2. Представление информации и работа с ней
- Глава 3. Представление программ на машинном уровне
- Глава 4. Архитектура процессора
- Глава 5. Оптимизация производительности программ
- Глава 6. Иерархия памяти
Часть II Выполнение программ в системе
Часть III Взаимодействие программ
- Глава 10. Системный уровень ввода/вывода
- Глава 11. Сетевое программирование
- Глава 12. Конкурентное программирование
- Три классические задачи иллюстрирующие проблему ошибок параллелизма
Оба автора, Рэндал Э. Брайант (Randal E. Bryant) и Дэвид Р. О'Халларон (David R. O'Hallaron), являются профессорами в Университете Карнеги-Меллона (Carnegie Mellon University, CMU).
Книга основана на курсе CMU: Учебник был разработан на основе курса "Introduction to Computer Systems" (Введение в компьютерные системы) (известного как 15-213), который они создали и преподавали в Школе компьютерных наук CMU.
Многие книги по компьютерным системам написаны для создателей таких систем и описывают, как скомпоновать оборудование или реализовать системное программное обеспечение, включая операционную систему, компилятор и сетевой интерфейс. Эта книга, напротив, написана для программиста и рассказывает, как прикладные программисты могут использовать свои знания о системах для создания более качественных программ.
Linux – одна из операционных систем, ведущих свою родословную от операционной системы Unix, первоначально разработанной в Bell Laboratories. К другим членам этого класса операционных систем относятся Solaris, FreeBSD и MacOS X. В последние годы эти операционные системы сохраняли высокий уровень совместимости благодаря усилиям по стандартизации POSIX и Standard Unix Specification. То есть сведения, что приводятся в этой книге, почти напрямую применимы ко всем этим "Unix-подобным" операционным системам.
GNU ("свободное" – в смысле "свобода слова", но не в смысле "бесплатное пиво")
GСС – один из множества полезных инструментов, созданных в рамках проекта GNU (сокращенно от "GNU’s Not Unix" – "GNU – не Unix"). Проект GNU – это освобожденная от налогов благотворительная акция, основанная Ричардом Столлменом (Richard Stallman) в 1984 году с амбициозной целью разработать законченную Unix-подобную систему, исходный код которой не обременен ограничениями на его изменение и распространение.
important
Важно, это не пересказ. Тут только то, что мне было интересно, и что я и решил записать. Книга кладезь знаний, ее нужно читать полностью.
Глава 1. Экскурс в компьютерные системы
Процессор
Ассемблер — это почти прямое отражение модели ЦП. Ассемблер — это язык, в котором вы разговариваете с процессором на его родном, аппаратном языке, почти без переводчика.
Ассемблер не является "абстрактным" языком.
Ассемблер — читаемая человеком форма машинных инструкций, которые:
- читаются по адресу из PC,
- оперируют регистрами,
- используют ALU,
- обращаются к памяти,
- явно управляют переходами.
Поэтому его синтаксис — это буквально текстовое описание того, что аппаратно делает процессор.
Центральный процессор (ЦП; Central Processing Unit, CPU), или просто процессор, – это механизм, который интерпретирует (или выполняет) инструкции, хранящиеся в основной памяти. Его ядро составляет устройство памяти с емкостью в одно слово (или регистр) – счетчик команд (Program Counter, PC). В любой конкретный момент времени он хранит адрес некоторой машинной инструкции в основной памяти. Кажется, что процессор работает в соответствии с очень простой моделью выполнения инструкций, определяемой его архитектурным набором команд. Сначала процессор читает инструкцию из памяти по адресу в счетчике команд (PC), интерпретирует биты инструкции, выполняет простые операции, определяемые инструкцией, а затем обновляет значение счетчика, записывая в него адрес следующей инструкции, которая может размещаться за текущей или где-то в другом месте в памяти.
Существует всего несколько таких простых операций, и все они связаны с обслуживанием основной памяти, блока регистров и арифметико-логического устройства (Arithmetic/Logic Unit, ALU).
Блок регистров – небольшое запоминающее устройство из совокупности регистров, каждый из которых имеет свое уникальное имя и может хра- нить одно слово.
Устройство ALU вычисляет новые значения данных и адресов. Назовем лишь несколько примеров простых операций, которые процессор может выполнить по требованию той или иной инструкции:
- загрузка: копирует байт или слово из основной памяти в регистр, затирая при этом предыдущее содержимое этого регистра;
- сохранение: копирует байт или слово из регистра в некоторую ячейку основной памяти, затирая при этом предыдущее содержимое этой ячейки;
- выполнение арифметико-логической операции: копирует содержимое двух ре гистров в ALU, выполняет соответствующую операцию с этими словами и запо минает результат в одном из регистров, затирая при этом предыдущее содер жимое этого регистра;
- переход: извлекает слово из самой инструкции и копирует его в счетчик команд (PC), затирая предыдущее его содержимое.
Любая осмысленная работа = сначала загрузить данные в регистры, потом работать с ними. И это сразу видно в ассемблере:
mov rax, [x] ; загрузка из памяти → регистр
add rax, rbx ; ALU работает только с регистрами
mov [y], rax ; сохранение результата в память
Синтаксис отражает реальные шаги железа:
- load
- compute
- store
Ассемблер — это декларативное описание работы ALU и регистров, а не "алгоритм" в привычном смысле.
Типичная инструкция:
add rax, rbx
Это буквально описание микроархитектурного действия:
- взять содержимое rax
- взять содержимое rbx
- передать в ALU
- результат записать обратно в rax
Базовые операции ассемблера:
- load
- store
- arithmetic / logic
- jump
А все остальные возможности — это уже композиция этих примитивов ассемблерных операции.
Различные виды кеш-памяти
Один из самых важных уроков этой книги заключается в том, что прикладные программисты, которые знают о наличии кеш-памяти, могут воспользоваться ею и увеличить производительность своих программ на порядок.
Машинные инструкции программы в начальный момент хранятся на диске. Когда производится загрузка программы, они копируются в основную память. По мере выполнения программы ее инструкции копируются из основной памяти в процессор.
Увеличить быстродействие процессора намного проще, чем заставить основную память работать быстрее. Чтобы уменьшить разрыв между процессором и основной памятью, создатели про- цессоров включили в них небольшие быстродействующие устройства хранения, получившие название кеш-память.
Кеш L1 (его еще называют кешем первого уровня) внутри процессора может хранить десятки тысяч байт, и доступ к ним осуществляется почти так же быстро, как к регистрам. Еще больший объем имеет кеш L2 (кеш второго уровня) – он может вместить от сотен тысяч до миллионов байт. Этот кеш связан с процессором специальной шиной. Скорость доступа к кешу L2 в 5 раз ниже скорости доступа к кешу L1, и все равно она в 5–10 раз выше скорости доступа к основной памяти. Кеши L1 и L2 построены по технологии, известной как статическая память с произвольным доступом (Static Random Access Memory, SRAM). Более новые и более мощные системы имеют три уровня кешей: L1, L2 и L3.
Кэши встроены прямо в чип процессора. Чем ближе кэш к "мозгам", тем он быстрее, но меньше и дороже.
| Уровень | Скорость (примерно) | Размер (примерно) | Где находится |
|---|---|---|---|
| Регистры | 0 тактов (мгновенно) | пару сотен байт | Внутри ядра |
| L1 Кэш | ~4 такта | 32–64 КБ | Внутри каждого ядра |
| L2 Кэш | ~10–12 тактов | 256–512 КБ | Рядом с ядром |
| L3 Кэш | ~30–50 тактов | 8–64 МБ | Общий на весь процессор |
| RAM | ~200–300 тактов | Гигабайты | Отдельная планка |
Идея поместить небольшое, зато более быстрое запоминающее устройство (кеш-память) между процессором и более емким, но с худшим быстродействием запоминающим устройством (основной памятью) оказалась весьма плодотворной. Фактически запоминающие устройства в любой вычислительной системе образуют иерархию.
По мере движения по этой иерархии сверху вниз устройства становятся все медленнее, объемнее, а стоимость хранения одного байта уменьшается. Регистры находятся на вершине иерархии, которая обозначается как уровень 0 (L0). Кеш-память занимает уровни с 1 по 3 (L1–L3). Основная память находится на уровне 4 (L4) и т. д. Основная идея иерархии памяти заключается в том, что память одного уровня служит кешем для следующего нижнего уровня. То есть блок регистров – это кеш для кеш-памяти L1. Кеши L1 и L2 служат кешами для кеш-памяти L2 и L3 соответственно.
Конкуренция и параллелизм
Конкуренция на уровне потоков
Основываясь на абстракции процессов, можно разрабатывать системы, в которых несколько программ выполняются одновременно, что приводит к конкуренции. Используя механизм потоков, можно даже запустить несколько потоков управления в рамках одного процесса.
Однопроцессорная система, конкурентное выполнение только моделируется – компьютер просто быстро переключался между выполняемыми процессами с загрузкой контекста.
Многопроцессорная система, все процессоры они управляются одним ядром операционной системы.
Многоядерные процессоры состоят из нескольких процессоров (называемых "ядрами"), интегрированных на один кристалл. Имеют в одной микросхеме четыре ядра, каждое со своими кешами L1 и L2, причем каждый кеш L1 разделен на две части: одна предназначена для хранения недавно выбиравшихся инструкций, а другая – данных. Ядра совместно используют кеш-память более высокого уровня (L3), а также интерфейс с основной памятью.
Гиперпоточность, которую иногда называют одновременной многопоточностью, – это технология, позволяющая одному процессору выполнять сразу несколько потоков управления. Это предполагает наличие нескольких копий определенных аппаратных средств процессора, таких как счетчики инструкций и блоки регистров, при этом другие аппаратные компоненты, такие как блок арифметических операций с плавающей точкой, наличествуют в единственном числе.
Параллелизм на уровне инструкций
Современные процессоры могут выполнять несколько инструкций одновременно. Использование конвейерной обработки, в которой действия, необходимые для выполнения инструкции, разделены на этапы, а аппаратное обеспечение процессора организовано в виде последовательности стадий, каждая из которых выполняет один из этапов. Стадии могут работать параллельно, выполняя разные части разных инструкций. Для поддержания скорости выполнения, близкой к 1 инструкции на такт, не требуется ничего особенно сложного. Процессоры, которые могут выполнять более одной инструкции за такт, называют суперскалярными. Прикладные программисты могут использовать эту модель для прогнозирования производительности своих программ, а затем писать программы так, чтобы сгенерированный код достигал более высокой степени параллелизма на уровне инструкций и, следовательно, работал быстрее.
Одиночный поток команд, множественный поток данных
На самом низком уровне многие современные процессоры имеют специальное оборудование, позволяющее одной инструкции параллельно выполнять несколько операций. Этот режим известен как одиночный поток команд, множественный поток данных (Single-Instruction, Multiple-Data, SIMD). Например, в последних поколениях процессоров Intel и AMD есть инструкции, которые могут параллельно складывать 8 пар чисел с плавающей точкой одинарной точности (тип данных float в языке C).
Эти инструкции SIMD предоставляются в основном для ускорения приложений, обрабатывающих изображения, звук и видео. Некоторые компиляторы пытаются автоматически использовать параллелизм этого вида в программах на C, но все же более надежным методом является разработка программ с использованием специальных типов векторных данных, поддерживаемых компиляторами, такими как GCC.
Итоги
Компьютерные системы состоят из аппаратных и программных средств, которые взаимодействуют с целью выполнения прикладных программ. Информация внутри компьютера представлена в виде групп битов, которые интерпретируются в зависимости от контекста. Программы транслируются другими программами в различные формы. Сначала они представлены в виде исходного текста ASCII, затем преобразуются компиляторами и компоновщиками в выполняемые файлы.
Процессоры читают и интерпретируют двоичные инструкции, находящиеся в основной памяти. Поскольку большую часть времени компьютеры тратят на копирование данных между основной памятью, устройствами ввода/вывода и регистрами процессора, память системы образует некоторую иерархию, на вершине которой находятся регистры процессора, далее следуют несколько уровней аппаратной кеш-памяти, затем основная DRAM-память и дисковая память. Чем выше находится устройство памяти в иерархии, тем выше его быстродействие и стоимость в пересчете на один бит. Кроме того, устройства памяти, находящиеся выше в иерархии, служат кешем для устройств памяти, находящихся ниже. Программисты могут оптимизировать производительность своих программ на языке С, изучив и воспользовавшись особенностями иерархии памяти.
Ядро операционной системы играет роль посредника между прикладными программами и аппаратными средствами. Оно реализует три фундаментальные абстракции:
- файлы, абстрагирующие устройства ввода/вывода;
- виртуальную память, абстрагирующую как основную память, так и дисковую;
- процессы, абстрагирующие процессоры, основную память и устройства ввода/вывода.
Наконец, сети дают компьютерным системам возможность обмениваться данными между собой. С точки зрения конкретной системы, сеть есть не что иное, как устройство ввода/вывода.
Глава 2. Представление информации и работа с ней
Хранение информации
Размеры данных
Каждый компьютер имеет размер машинного слова, указывающий номинальный размер указателя. Поскольку виртуальные адреса кодируются такими словами, то наиболее важным системным параметром, определяемым размером слова, является максимальный размер виртуального адресного пространства. То есть для машины с размером слова в w бит диапазон виртуальных адресов охватывает от 0 до – 1, обеспечивая программе доступ максимум к байт.
В настоящее время наблюдается масштабный переход от машин с размером слова в 32 бита к машинам с размером слова в 64 бита.
Почему 32-битная система ограничена ~4 ГБ?
- Размер указателя (адреса) = 32 бита (4 байта).
- Каждое значение указателя — это число от
0x00000000до0xFFFFFFFF(в шестнадцатеричной) или от0до2³² − 1. - 2³² = 4 294 967 296 возможных адресов.
Каждому байту памяти присваивается свой уникальный адрес (байтовая адресация), поэтому в 32-битной системе максимально адресумая ячейка памяти в виртуальном адресном пространстве процесса ограничена числом 4_294_967_296 = 2³²− 1 = 0xFFFFFFFF = 4 ГБ
Для 64-битной системы, количество адресов байт = 16_000_000_000 ГБ = 15_625_000 ТБ = 16 Эбайт.
Но реально в современных 64-битных процессорах (x86_64, ARM64) используются не все 64 бита для адресации:
- Стандартный режим (48 бит):
262_144 ГБ = 256 ТБ - Расширенный режим (57 бит с 5-level paging):
134_217_728 ГБ
Для языка C:
- Тип данных long в 32-разрядных программах обычно имеет размер 4 байта, а в 64-разрядных – 8 байт.
- Тип
void*(указатель) в 32-разрядных программах 4 байта (32 бита), а в 64-разрядных – 8 байт (64 бита). - Тип size_t в 32-разрядных программах 4 байта (32 бита), а в 64-разрядных – 8 байт (64 бита)
Правильный подход для переносимого кода:
#include <stdint.h>
// Использовать фиксированные типы:
int8_t - // 8 bit (1 byte) Всегда 8 бит, тоже самое signed char
int16_t - // 16 bit (2 byte) Всегда 16 бит
int32_t - // Всегда 32 бита
int64_t - // Всегда 64 бита
uintptr_t - // Беззнаковый тип, вмещающий указатель
size_t - // Для размеров объектов (меняется с разрядностью)
Адресация и порядок следования байтов
Для программных объектов, занимающих несколько байтов, необходимо установить два правила: каков будет адрес объекта и как должны располагаться байты в памяти.
Практически во всех машинах такие объекты хранятся в виде непрерывных последовательностей байтов, а адресом многобайтного объекта служит наименьший адрес ячейки памяти. Например, предположим, что переменная x типа int имеет адрес 0x100, т.е. выражение взятия адреса &x вернет 0x100. Тогда четыре байта, составляющих значение переменной x, будут храниться в ячейках памяти 0x100, 0x101, 0x102 и 0x103.
Как должны располагаться байты в памяти.
- Первое правило: порядок, когда первым следует наименьший значащий байт, называется обратным, или остроконечным (little endian).
- Второе правило: порядок, когда первым следует наибольший значащий байт, называется прямым, или тупоконечным (big endian).
Порядок байтов фиксируется с выбором конкретной операционной системы.
Little-endian (LE)
- Наименее значимый байт идёт первым (по меньшему адресу).
- Пример:
0x12345678хранится как78 56 34 12. - Доминирование архитектуры x86 — Intel выбрала LE, и теперь это стандарт де-факто для десктопа.
- Так делают почти все современные процессоры (Intel x86, AMD64, ARM в режиме по умолчанию). Это логично для схем и кода, удобнее считать и обрабатывать данные.
- Простота приведения типов —
int16_t x = 0x1234; → int8_t y = (int8_t)x;даст0x34без сдвига адреса. - Эффективность арифметики — сложение/вычитание начинается с младших байтов, можно не знать длину числа.
Big-endian (BE)
- Наиболее значимый байт идёт первым (по меньшему адресу).
- Пример:
0x12345678хранится как12 34 56 78. - Человеку этот способ привычнее, потому что мы пишем числа "от старшего к младшему".
- Простота отладки — дамп памяти читается как шестнадцатеричное число.
- В сетевых протоколах (TCP/IP) стандарт принят именно BE (его ещё называют network byte order).
Почему это важно
- Если два компьютера обмениваются числами напрямую в байтах, они должны договориться о порядке байт.
- Если вы записываете числа в бинарный файл, порядок байт должен быть фиксирован и понятен для всех, кто будет его читать.
- Ошибка с порядком байт может "перевернуть" значения:
0x12345678(305419896) на LE выглядит как78 56 34 12(2018915346 на BE, если интерпретировать не тем способом).
Текстовые данные менее зависимы от платформы, нежели двоичные.
Текстовые данные (например, JSON, XML, CSV, plain text):
- Платформенно-независимы — используют только ASCII/Unicode символы
- Портативны — одинаково читаются на x86, ARM, big-endian, little-endian
- Отлаживаемы — можно открыть в любом текстовом редакторе
Двоичные данные (бинарные файлы):
Зависят от:
- Endianness (порядок байтов)
- Размер типов (
int= 4 или 8 байт?) - Выравнивание структур (padding)
- Представление чисел с плавающей точкой
...
info
далее в книге идет речь про особенности представления чисел в бинарном виде. Особенности при операциях с вещественными числами и как вещественные числа хранятся в памяти.
- Округление к ближайшему четному (Round to Even)
- "Дыры" в представлении вещественных числах компьютером
- Представление значений с плавающей точкой в стандарте IEEE
- Почему максимальное отрицательное число не может быть представленно беззнаковым типом того разряда... Особенности при операциях с целыми знаковыми и т.д.. Ситуации переполнения типа, битовые сдвиги ...
И про то что компилятор может не предупредить о возникновении переполнения типа ...
Глава 3. Представление программ на машинном уровне
Свой технический обзор мы начнем с того, что покажем связь между исходным кодом на языке С, ассемблерным и объектным кодами. Затем перейдем к исследованию особенностей архитектуры x86-64, начав с представления данных, манипулирования ими и реализации управления.
Зачем же тратить время на изучение машинного кода:
- какими возможностями обладает компилятор, и выявить неэффективные фрагменты программы.
Трансляция выполняется в четыре этапа. Совокупность программ, выполняющих эти четыре этапа (препроцессор, компилятор, ассемблер и компоновщик), называется системой компиляции.
Последовательность работы GCC (GNU Compiler Collection):
1. Препроцессинг (Preprocessing)
Инструмент: cpp
Что происходит: Работа с текстом программы.
- Удаляются комментарии.
- Подставляется содержимое заголовочных файлов (
#include). - Разворачиваются макросы (
#define). - Результат: "Чистый" код на Си (обычно файл с расширением
.i).
2. Компиляция (Compilation)
Инструмент: cc1
Что происходит: Самый сложный этап. Компилятор анализирует синтаксис, проверяет ошибки и переводит код с языка Си на язык ассемблера.
- Результат: Текстовый файл с инструкциями ассемблера (расширение
.s). - В вашем тексте этот этап назван генерацией ассемблерного кода.
3. Ассемблирование (Assembly)
Инструмент: as
Что происходит: Перевод текстовых команд ассемблера в машинный код (нули и единицы), который понимает процессор.
- Результат: Объектный файл (расширение
.oили.obj). Это уже машинный код, но его еще нельзя запустить, так как в нем не прописаны адреса внешних функций (например,printf).
4. Компоновка / Линковка (Linking)
Инструмент: ld
Что происходит: Сборка всех объектных файлов и системных библиотек в один целое. Линкер "сшивает" вызовы функций с их реальными адресами в памяти.
- Результат: Исполняемый файл (например,
a.out,main.exeили ELF).
Программный код
Прямая компиляция всех файлов.
Вместо того чтобы вводить четыре команды для каждого файла:
gcc -c p1.c
gcc -c p2.c
gcc -o p p1.o p2.o
Запускает всю цепочку преобразований одним махом для нескольких файлов сразу.
gcc -Og -o p p1.c p2.c
Флаг оптимизации -Og - оптимизирует, но бережет структуру программы, специально для удобства отладки (GDB)
Когда мы смотрим на результат оптимизации -Og, мы можем увидеть, что компилятор, например, не смог соптимизировать наш цикл. Это сигнал: "вы написали код так запутанно, что даже компилятор боится его трогать". Если мы поможем компилятору на уровне -Og (сделаешь код чище), то на уровне -O3 он выдаст еще более впечатляющий результат.
Машинный код
File mstore.c:
long mult2(long, long);
void multstore(long x, long y, long *dest) {
long t = mult2(x, y);
*dest = t;
}
Чтобы увидеть соответствующий ассемблерный код формата AT&T (по умолчанию), сгенерированный компилятором С, добавим в командную строку параметр -S:
# создание ассемблерного представления кода из mstore.c
gcc -Og -S mstore.c
По этой команде GCC запустит компилятор, сгенерирует ассемблерный код, сохранит его в файле mstore.s и на этом остановится. (В обычной ситуации он далее вызывал бы ассемблер, чтобы тот сгенерировал файл с объектным кодом.)
# в стандартном предтавлении ассемблерного кода формата AT&T
$ — это число, а % — регистр. И порядок обратный: "откуда -> куда"
File mstore.s:
.file "mstore.c"
.text
.globl multstore
.type multstore, @function
multstore:
.LFB0:
.cfi_startproc
endbr64
pushq %rbx
.cfi_def_cfa_offset 16
.cfi_offset 3, -16
movq %rdx, %rbx
call mult2@PLT
movq %rax, (%rbx)
popq %rbx
.cfi_def_cfa_offset 8
ret
.cfi_endproc
.LFE0:
.size multstore, .-multstore
.ident "GCC: (Ubuntu 13.3.0-6ubuntu2~24.04) 13.3.0"
.section .note.GNU-stack,"",@progbits
.section .note.gnu.property,"a"
.align 8
.long 1f - 0f
.long 4f - 1f
.long 5
0:
.string "GNU"
1:
.align 8
.long 0xc0000002
.long 3f - 2f
2:
.long 0x3
3:
.align 8
4:
Для ассемблерного представления в формате Intel,Microsoft
# создание ассемблерного представления кода из mstore.c
gcc -Og -S -masm=intel mstore.c
File mstore.s:
.file "mstore.c"
.intel_syntax noprefix
.text
.globl multstore
.type multstore, @function
multstore:
.LFB0:
.cfi_startproc
endbr64
push rbx
.cfi_def_cfa_offset 16
.cfi_offset 3, -16
mov rbx, rdx
call mult2@PLT
mov QWORD PTR [rbx], rax
pop rbx
.cfi_def_cfa_offset 8
ret
.cfi_endproc
.LFE0:
.size multstore, .-multstore
.ident "GCC: (Ubuntu 13.3.0-6ubuntu2~24.04) 13.3.0"
.section .note.GNU-stack,"",@progbits
.section .note.gnu.property,"a"
.align 8
.long 1f - 0f
.long 4f - 1f
.long 5
0:
.string "GNU"
1:
.align 8
.long 0xc0000002
.long 3f - 2f
2:
.long 0x3
3:
.align 8
4:
Чтобы увидеть двоичный объектный код (например, в файле mstore), можно воспользоваться дизассемблером, который покажет, что программный код процедуры содержит 14 байт.
# создание обьектного файла mstore.o
gcc -Og -c mstore.c
# запустить отладчик GNU GDB
gdb mstore.o
output:
# вывести 18 байт начиная с метки multstore
(gdb) x/18xb multstore
0x0 <multstore>: 0xf3 0x0f 0x1e 0xfa 0x53 0x48 0x89 0xd3
0x8 <multstore+8>: 0xe8 0x00 0x00 0x00 0x00 0x48 0x89 0x03
0x10 <multstore+16>: 0x5b 0xc3
(gdb) q
Для исследования содержимого файлов с машинным кодом особенно ценным может оказаться класс программ, известных как дизассемблеры. Эти программы генерируют из машинного кода программный код на языке ассемблера.
objdump -d mstore.o
output:
mstore.o: file format elf64-x86-64
Disassembly of section .text:
0000000000000000 <multstore>:
Смещение | Байты | Эквивалент на языке ассемблера
0: f3 0f 1e fa endbr64
4: 53 push %rbx
5: 48 89 d3 mov %rdx,%rbx
8: e8 00 00 00 00 call d <multstore+0xd>
d: 48 89 03 mov %rax,(%rbx)
10: 5b pop %rbx
11: c3 ret
Чтобы получить фактический выполняемый код, файлы с объектным кодом необходимо обработать компоновщиком, при этом один из этих файлов обязательно должен содержать функцию main. Предположим, что в файле main.с определена следующая функция:
File main.c:
#include <stdio.h>
void multstore(long, long, long *);
int main() {
long d;
multstore(2, 3, &d);
printf("2 * 3 --> %ld\n", d);
return 0;
}
long mult2(long a, long b) {
long s = a * b;
return s;
}
В таком случае мы можем сгенерировать выполняемый файл prog программы следующим образом:
gcc -Og -o prog main.c mstore.c
Размер файла prog вырос до 8655 байт, потому что он содержит не только машин- ный код двух процедур, но и информацию, используемую для запуска и завершения программы, а также для взаимодействия с операционной системой.
Файл prog можно дизассемблировать:
objdump -d prog
Результат дизассемблирования функции multstore в двоичном файле prog
00000000000011d8 <multstore>:
11d8: f3 0f 1e fa endbr64
11dc: 53 push %rbx
11dd: 48 89 d3 mov %rdx,%rbx
11e0: e8 e7 ff ff ff call 11cc <mult2>
11e5: 48 89 03 mov %rax,(%rbx)
11e8: 5b pop %rbx
11e9: c3 ret
Этот код практически идентичен полученному при дизассемблировании файла mstore.o. Главное отличие – другие адреса в колонке слева. Компоновщик изменил местоположение этого кода, в результате чего адреса инструкций изменились. Второе отличие – компоновщик заполнил адрес вызываемой функции mult2 в инструкции callq. Одна из задач компоновщика – сопоставить вызовы функций с их местоположениями.
Вот как выглядит версия нашего примера с комментариями:
push %rbx ; Сохранить %rbx на стеке
mov %rdx,%rbx ; Скопировать dest в %rbx
call 11cc <mult2> ; Вызвать mult2(x, y)
mov %rax,(%rbx) ; Сохранить результат по адресу *dest
pop %rbx ; Восстановить %rbx
ret ; Вернуть управление
В некоторых ситуациях программистам приходится прибегать к ассемблерному коду, чтобы получить доступ к низкоуровневым возможностям машины.
Один из способов получить такой доступ – написать группу функций на ассемблере и объединить их с функциями на C на этапе компоновки. Написать функцию целиком на языке ассемблера, поместить ее в отдельный файл и позволить ассемблеру и компоновщику объединить ее с программным кодом на C.
Мы разделяем логику: алгоритм пишем на Си, а "грязную" работу с железом — в отдельном .s файле.
Файл с кодом на ассемблере math_tools.s:
# math_tools.s
.globl asm_add # Делаем имя функции видимым для линкера
asm_add:
# В x86-64 (Linux) первые два аргумента приходят в регистрах:
# edi — первое число
# esi — второе число
addl %esi, %edi # Складываем: edi = edi + esi
movl %edi, %eax # Результат функции всегда должен лежать в eax
ret # Возврат в вызывающую функцию
Инструкция movl означает (mov + l) перемещение двойного слова:
b- 1 байт charw- 2 байта short словоl- 4 байта int двойное словоq- 8 байт long или char* четверное словоs- 4 байта float одинарной точностиl- 8 байт double двойное слово
Файл main.c:
#include <stdio.h>
// Объявляем внешнюю функцию, написанную на ассемблере
extern int asm_add(int a, int b);
int main() {
int x = 10;
int y = 20;
int result = asm_add(x, y);
printf("Результат из ассемблера: %d\n", result);
return 0;
}
Сборка:
- Компилируем Си:
gcc -c main.c -o main.o - Ассемблируем Асм:
gcc -c math_tools.s -o math_tools.o - Линкуем всё вместе:
gcc main.o math_tools.o -o my_app
В должны строго соблюдать Calling Convention (соглашение о вызовах). Если вы решите забрать аргументы не из тех регистров (например, из ebx вместо edi), программа получит мусор вместо чисел. Для x86-64 в Linux порядок такой: rdi, rsi, rdx, rcx, r8, r9.
Второй способ (Inline Assembly) – использовать поддержку GCC для встраивания ассемблерного кода непосредственно в программы на C. Использовать поддержку встраивания ассемблерного кода, имеющуюся в GCC, позволяющую с помощью директивы asm вставлять короткие фрагменты кода на ассемблере прямо в программу на C. Преимущество этого подхода в том, что он сводит к минимуму объем машинно зависимого кода.
Вам не нужно знать Calling Convention: Вам не обязательно помнить, что первый аргумент должен быть в rdi. Вы просто говорите компилятору: "Мне нужно это число в любом свободном регистре", и GCC сам выберет лучший вариант.
Файл main.c:
#include <stdio.h>
int main() {
int x = 10;
int y = 20;
int result;
// Вставка ассемблерного кода прямо в Си
__asm__ (
"addl %%ebx, %%eax;" // Сама команда: eax = eax + ebx
: "=a" (result) // Выходные данные: буква 'a' означает регистр eax. Результат будет в eax, запиши его в 'result'
: "a" (x), "b" (y) // Входные данные: буква 'b' означает регистр ebx. Положи 'x' в eax, а 'y' в ebx
);
printf("Результат из inline-вставки: %d\n", result);
return 0;
}
Сборка:
gcc -o main main.c
Устройство регистров:
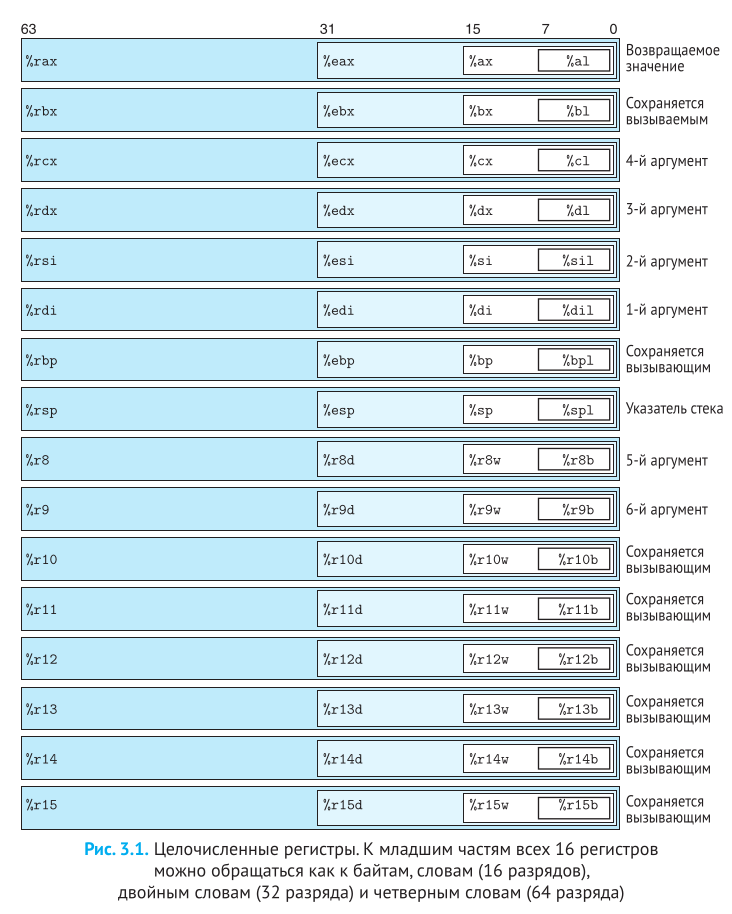
Как показывают вложенные прямоугольники, инструкции могут работать с данными разного размера, хранящимися в младших байтах 16 регистров. Операции с отдельными байтами манипулируют младшими байтами, 16-разрядные операции – двумя младшими байтами, 32-разрядные операции – четырьмя младшими байтами, 64-разрядные операции – целыми регистрами.
Адресная арифметика AGU — Address Generation Unit
(правильно располагать данные в RAM)
important
Почему это важно знать?
Как x86-64 за один такт вычисляет адрес в памяти.
Должно соблюдаться условие:
- адрес начала массива должен быть кратен размеру данных. Если массив из int (4 байта), то адрес начала должен делиться на 4
- размер данных элементов массива должен быть степенью двойки т.е. строго (1, 2, 4 и 8), если размер больше даже если 16, 32 все равно в один такт не получится.
- размер структуры должен быть выровнен и поля структуры должны быть уложены в чанки по 8 байт.
В железе (в блоке AGU) умножение на произвольное число (например, на 7 или 13) — это медленная операция, требующая полноценного умножителя. А умножение на 1, 2, 4 и 8 делается простым битовым сдвигом влево (на 0, 1, 2 или 3 бита).
Вот формула того, как процессор вычисляет адреса элементов массива и структур. Процессор x86-64 выполняет эту формулу аппаратно внутри одного блока (AGU — Address Generation Unit). Это значит, что сложение и умножение в этой формуле происходят бесплатно с точки зрения времени. Он вычисляет весь адрес целиком за один такт.
Addr = D + Reg[Rb] + Reg[Ri] * S
- D (Displacement): Смещение. Удобно для доступа к полям в структурах (struct)
- Rb (Base): Базовый регистр. Начало массива или объекта
- Ri (Index): Индексный регистр. Номер элемента в массиве
- S (Scale): Множитель (только 1, 2, 4 или 8). Размер типа данных (int — 4 байта, double или указатель — 8 байт)
Пример:
int arr[6] = {1,2,3,4,5,6};
int x = arr[5];// Компилятор превратит вычисление адреса элемента массива в одну инструкцию: (%rdx, %rcx, 4)
- %rdx — адрес начала массива
- %rcx — твой индекс
- 4 — потому что int занимает 4 байта
Допустим:
- D (Displacement) смещение равно 0
- Rb (Base) адрес начала массива %rdx равен 1000
- Ri (Index) равен 5
- S (Scale) размер типа данных для int 4
Addr = D + Reg[Rb] + Reg[Ri] * S = 0 + 1000 + 5 * 4 = 1020
Процессор мгновенно вычисляет адрес 1020 за один такт в AGU, обращается к памяти и забирает оттуда число 6.
Почему индексы массивов начинаются с нуля, если индекс Ri = 0, то: Addr = Base + 0 * Scale = Base т.е. адрес самого массива.
Если у нас массив содержит тип данных размер которых не кратен степени двойки, например, не выровненная структура с двумя полями double и int = 12 байт, процессор уже не сможет вычислить адрес за один такт в AGU с помощью формулы D(Rb, Ri, S)
Выравнивание (Alignment) — это вторая часть проблемы
Даже если мы вычислили адрес правильно, в дело вступает шина данных. Процессор тянет данные из памяти кусками по 8 байт (64 бита). Эти куски "нарезаны" в памяти строго по адресам, кратным 8.
Если наш double лежит по адресу 0x08, он идеально попадает в один "заход" процессора.
Если наш double из-за кривого размера структуры оказался на адресе 0x05, он "размазан" между двумя блоками памяти. Процессору нужно два раза сходить в память, достать два куска, отрезать лишнее и склеить остаток.
Condition Codes, как работают if и while через флаги процессора
(Минимизация прыжков т.е. if, while, for, switch. Писать логику так, чтобы процессор не захлебывался)
Флаги состояния (Condition Codes)
В процессоре есть специальный регистр флагов (EFLAGS). Почти любая арифметическая операция (сложение, вычитание и т.д.) меняет эти флаги как "побочный эффект".
- ZF (Zero Flag): Установится в 1, если результат операции был 0. (Идеально для
if (a == b), так как a - b = 0) - SF (Sign Flag): Установится в 1, если результат отрицательный. (Для проверок
a < b) - CF (Carry Flag): Флаг переноса (для беззнаковых чисел)
- OF (Overflow Flag): Флаг переполнения (для чисел со знаком)
Команды сравнения (cmp и test)
- cmp b, a: Вычисляет
a - b. Результат выкидывает, но выставляет флаги (ZF, SF и т.д.) - test b, a: Вычисляет
a & b(побитовое И). Тоже выкидывает результат, но выставляет флаги
Прыжки (Jumps)
Процессор читает флаги и, если условие совпадает, меняет свой Instruction Pointer (указатель на следующую строку кода)
- je (Jump if Equal): Прыгнуть, если флаг ZF=1.
- jne (Jump if Not Equal): Прыгнуть, если ZF=0.
- jl (Jump if Less): Прыгнуть, если результат был меньше нуля.
Прыжки (условные переходы) тормозят конвейер (pipeline) вычисления процессора. Современный процессор загружает в конвейер десятки инструкций наперед, а jmp ломает эту цепочку.
- Для безусловного jmp: Процессор внезапно понимает, что всё, что он уже успел загрузить в конвейер "после" прыжка — это мусор. Ему нужно всё выкинуть, пойти по новому адресу и начать загружать инструкции заново. Это пустые такты ожидания.
- Для условного перехода (je, jg): Тут еще хуже. Процессор не знает, прыгнет он или нет, пока не выполнит сравнение. Чтобы не стоять на месте, он гадает (Branch Prediction). Если угадал — молодец. Если ошибся — "катастрофа": конвейер полностью очищается, все вычисления обнуляются, и процессор начинает работать с нуля по другой ветке.
Современные процессоры суперскалярны (Superscalar execution) они имеют несколько конвейеров (pipeline) работающих параллельно, которые загружены теми инструкциями кода который предсказал (Branch Predictor), когда предсказатель ошибается (Branch Misprediction), процессор выкидывает все результаты из всех параллельных линий и полностью очищает конвейер. Если есть работа которая не зависит от предыдущей работы то это будет просчитано в одном из конвейеров заранее. Например независимые данные будут просчитаны параллельно
a = b + c;
d = e + f;
В таком случае конвейер будет стоять и ждать, пока первый закончит работу. Это называется Data Dependency (зависимость по данным):
a = b + c;
d = a + f; // d зависит от результата первой строки
Например, развертывание циклов (Loop Unrolling).
Вместо того чтобы считать по одному числу в цикле:
for (i = 0; i < 100; i++) {
sum += a[i]; // Каждая итерация зависит от предыдущей (sum)
}
Чтобы задействовать параллельные конвейеры:
for (i = 0; i < 100; i += 2) {
sum1 += a[i]; // Конвейер 1
sum2 += a[i + 1]; // Конвейер 2 (не зависит от sum1)
}
total_sum = sum1 + sum2;
Это будет работать почти в два раза быстрее, потому что мы дали процессору возможность загрузить две параллельные линии одновременно. Мы убрали "зависимость по данным" (Data Dependency) на уровне одной итерации.
Совсем без прыжков программу не напишешь. Поэтому инженеры придумали, как сделать их менее болезненными:
-
Loop Unrolling (Развертывание цикла): Вместо того чтобы делать цикл на 4 итерации с 4 прыжками:
for(int i=0; i<4; i++) a[i] = 0; Компилятор делает так: a[0] = 0; a[1] = 0; a[2] = 0; a[3] = 0;// Прыжков — ноль. Конвейер забит полезной работой. -
Conditional Move (cmov): вместо "прыгни, если больше", процессор просто говорит: "Вычисли оба варианта, а в конце я просто перепишу результат в зависимости от флага". Прыжка нет физически, конвейер идет ровно. Это можно реализовать заменой if на тернарный оператор.
important
Почему это важно знать?
- Предсказание переходов (Branch Prediction): Процессор пытается угадать, прыгнет он или нет, еще до того, как выполнит cmp. Если он ошибается, он теряет кучу тактов на очистку конвейера.
- Условные передачи (cmov): Современные компиляторы иногда заменяют
ifна специальные инструкции, которые вообще не требуют прыжков, что делает код невероятно быстрым.
Предсказание переходов (Branch Prediction)
Современный процессор — это конвейер. Он начинает выполнять следующие команды еще до того, как закончил текущую. Когда он видит if (condition), он не ждет результата сравнения, а угадывает, куда пойдет код, и начинает выполнять ту ветку заранее.
Это называется спекулятивное выполнение (speculative execution). Процессор — это своего рода игрок на ставках: он ставит на один из исходов if, чтобы не простаивать. Если ставка не сыграла, он делает "откат" (pipeline flush), что стоит примерно 15–20 тактов работы.
Вот основные стратегии, как писать код, чтобы процессор "угадывал" чаще:
1. Сортировка данных
Если мы обрабатываем массив в цикле и внутри есть if, процессор будет угадывать почти идеально, если данные отсортированы.
2. Избавление от веток (Branchless Programming)
Если можно заменить if математикой — сделайте это.
Пример: Найти сумму всех элементов массива, которые больше 10.
С ветвлением:
if (a[i] > 10) sum += a[i];
Без ветвления (математически):
sum += (a[i] > 10) * a[i];
итог: у процессора него нет выбора пути, а значит, нет риска ошибки.
Нет прыжка — нет риска ошибиться в предсказании — код работает быстрее.
3. Использование тернарного оператора (cmov)
Компиляторы часто превращают простые тернарные операторы в инструкцию cmov (Conditional Move)
int max = (a > b) ? a : b;
итог: Нет прыжка — нет риска ошибиться в предсказании — код работает быстрее.
4. Избегайте switch с кучей мелких кейсов
Если в switch 20 разных вариантов, которые выпадают случайно, предсказатель переходов просто "сойдет с ума". В таких случаях лучше либо структурировать данные иначе, либо использовать таблицы переходов (которые компилятор сам создаст, если кейсы идут плотно по порядку).
5. Пишите простые условия выхода из цикла.
Чем проще условие в while, тем легче компилятору превратить его в эффективный do-while с одним прыжком.
6. Вероятные и невероятные ветки (Likely/Unlikely)
Если вы точно знаете, что одно условие срабатывает в 99% случаев (например, проверка на ошибку, которой почти никогда не бывает), вы можете подсказать компилятору.
В современных компиляторах (GCC/Clang) есть макросы:
if (__builtin_expect(ptr == NULL, 0)) { // говорим, что NULL — это почти невозможно
// код обработки редкой ошибки
}
Компилятор переставит блоки кода в ассемблере так, чтобы основная ветка шла "напролом" без прыжков, а редкая — была в стороне.
Procedures (процедуры или функции)
(Главный враг кэша — "Прыжки")
Почему программисты используют inline функции? — они просят компилятор не делать "телепортацию", а просто вставить код функции прямо в место вызова, превращая это в обычную линейную последовательность команд без всяких стеков. Но у него есть обратная сторона: если функция огромная и мы "инлайним" её в 100 местах, размер нашего исполняемого файла (.exe или .bin) раздувается. Это может привести к тому, что код перестанет влезать в L1-кэш инструкций процессора, и программа, как ни парадоксально, станет работать медленнее. Поэтому компиляторы иногда игнорируют просьбу об inline, если видят, что это навредит.
important
Почему это важно знать?
Вызов функции — это самый дорогой прыжок. Нужно сохранить адрес возврата (Return Address), очистить/сохранить регистры и, возможно, выделить еще память в стеке под локальные данные в функции.
Для этого call прыжка процессор использует струтуру Stack заполняя ее последовательно состоянием программы, что бы при возврате ret снова восстановить то состояние которое было до прыжка.
Стек в x86-64 — это область памяти, которая растет вниз (от больших адресов к меньшим). За него отвечает регистр %rsp (Stack Pointer).
Передача аргументов (Секрет скорости x86-64). В современной x86-64 первые 6 аргументов передаются через регистры (%rdi, %rsi, %rdx, %rcx, %r8, %r9).
Локальные переменные. Если внутри функции не хватает регистров, мы "откусываем" кусок памяти у стека, просто уменьшая значение %rsp. Это и есть "рюкзак" памяти стека (Stack Frame), где лежат локальные переменные.
Безопасность (Buffer Overflow): Если мы запишем в локальный массив больше данных, чем он вмещает, мы можем затереть тот самый Return Address. Тогда, когда функция будет возвращаться ret, она прыгнет не назад в код, а по адресу, который подсунул хакер.
Кэш-френдли код (Cache Locality)
Почему огромные двумерные массивы лучше обходить "по строкам", а не "по столбцам"
void func(int arr[8][5]) // 8 рядов (строк) и 5 столбцов (колонок)
Память хранит данные линейно.
important
Почему это важно знать?
- Строка = Ряд (Row) — Друзья кэша.
- Колонка = Столбец (Column) — Враги кэша (если идти только по ним).
Поскольку данные двумерного массива лежат по строкам (Row-major order), т.е. линейно, процессор читает их эффективно только тогда, когда мы идем по ним подряд.
Процессор высчитывает адрес ячейки, умножая индекс строки на количество элементов в ряду, и заполняет свой кэш кэш-линиями (Cache Line по 64 байта), в которые попадает сразу пачка соседних элементов этого ряда.
Когда мы обращаемся по индексу массива, процессор не загружает из медленной RAM только один элемент. Он грузит всю Cache Line (64 байта), если она еще не была загружена в кэш, и это занимает ~200 тактов. Так как массив содержит данные последовательно, то вся Cache Line в идеале — это кусок строки (ряда) многомерного массива. Основываясь на формуле нахождения адреса Addr = Base + (i * colls + j) * SizeOf(T), процессор за 1 такт вычисляет адрес, а затем за ~1-4 такта берет значение, если оно уже оказалось в кэш-линии.
Вот почему Связанные Списки (Linked Lists) — это "убийцы" кэша. В связанном списке каждый узел создается через malloc в случайном месте памяти. Вы читаете node1. Приезжает Cache Line. Но node2 лежит в другом конце RAM! Ваша Cache Line, которую вы только что загрузили, содержит мусор. Для каждого узла списка процессор снова и снова ждет по 200 тактов.
Для:
rows = 10 ; 10 рядов
colls = 5 ; 5 строк
int matrix[rows][colls];
Если нужно получить значение по адресу matrix[2][3], то:
Addr = Base + (2 * 5 + 3) * 4
* Base: Адрес в памяти, где начинается самый первый элемент matrix[0][0]
* i (индекс строки) = 2
* colls (количество элементов в строке) = 5
* j (смещение внутри строки) = 3
* SizeOf(T) = 4 (так как тип данных — int)
Высший пилотаж оптимизации: Если в многомерном массиве длина строки (количество элементов в одном ряду) будет степенью двойки (2, 4, 8, 16, 32...), то вычисление адреса становится для процессора "реактивным". Это следует из упрощения операции умножения на длину строки в формуле: процессор заменит её на быструю операцию сдвига
<<.Addr = Base + (i << shift) + (j << size_shift)
Проход по рядам (строкам). Кэш-френдли код:
int matrix[][5] = {
{1, 2, 3, 4, 5},
{6, 7, 8, 9, 10},
{11,12,13,14,15},
...
};
for (int i = 0; i < 10; i++)
for (int j = 0; j < 5; j++)
sum += matrix[i][j]; // Мы идем подряд по памяти
// Последовательность прохода (физически в памяти):
// [1][2][3][4][5][6][7][8][9][10]... — всё берется из одной кэш-линии.
Проход по столбцам (колонкам). Медленный код:
for (int j = 0; j < 5; j++)
for (int i = 0; i < 10; i++)
sum += matrix[i][j]; // Мы прыгаем через целые строки!
// Последовательность прохода:
// [1][6][11][2][7][12]... — каждый шаг требует новую кэш-линию.
Проход по столбцам может быть в 10–50 раз медленнее, потому что при каждом шаге процессор промахивается мимо кэша (Cache Miss). Он загрузил в кэш (L1) кусок строки (64 байта), а мы следующим шагом просим его прыгнуть на N элементов вперед, которых нет в текущей кэш-линии. Процессору приходится снова идти в медленную память (RAM), что занимает ~200–300 тактов вместо ~1–4 тактов, если бы данные были в кэше.
Попытка повлиять на поведение кеша
Что происходит:
- cache line = 64 байта = 16 int
- мы используем 1 int, а остальные 15 выбрасываются
- L1/L2 постоянно вытесняются
- prefetcher не справляется, т.к. шаг доступа = N * sizeof(int)
#include <stdio.h>
#include <stdlib.h> // EXIT_SUCCESS, EXIT_FAILURE
#include <time.h>
#define N 2048
int main(void) {
clock_t start = clock();
static int matrix[N][N];
// Инициализация
for (int i = 0; i < N; i++)
for (int j = 0; j < N; j++)
matrix[i][j] = i + j;
long long sum = 0;
// ❌ ПЛОХО: обход по столбцам
for (int j = 0; j < N; j++) {
for (int i = 0; i < N; i++) {
sum += matrix[i][j];
}
}
clock_t end = clock();
double cpu_time_used = ((double) (end - start)) / CLOCKS_PER_SEC;
printf("%lld\n", sum);
printf("Процессорное время: %f секунд\n", cpu_time_used);
return EXIT_SUCCESS;
}
gcc -Og -o cache_miss cache_miss.c && ./cache_miss
Процессорное время:
- 0.056399
- 0.057095
- 0.052826
Есть способы влиять на поведение кеша, в том числе предварительно загружать нужные кеш-линии.
Эти инструкции подсказывают процессору, что скоро понадобятся данные по указанному адресу, и он может загрузить их заранее, пока CPU занят другими операциями
Альтернативы:
- prefetcht1 — для L2,
- prefetcht2 — для L3,
- prefetchnta — non-temporal prefetch (для данных, которые скоро станут ненужными — не вытесняет другие данные из кеша).
Важно: prefetch — это подсказка, а не принудительная загрузка. Процессор может её проигнорировать (например, при нехватке пропускной способности памяти).
int main() {
const int N = 32;
int data[] = {1,5,4,5,7,2,1,5,4,5,7,1,5,4,5,7,1,5,4,5,7,1,5,4,5,7,1,5,4,5,7,6};
// Подсказать процессору: скоро понадобится data[i]
for (int i = 0; i < N; i += 16) {
_mm_prefetch((const char*)&data[i + 64], _MM_HINT_T0); // заглянуть вперёд на 64 байта
// ... обработать data[i] ...
}
// Если вы обрабатываете массив поблочно по 64 байта (размер кеш-линии), и знаете, что следующая линия понадобится через несколько тактов — делайте prefetch на 1–2 линии вперёд.
// __builtin_prefetch(&array[i + 128], 0, 3); // заглянуть на 2 шага вперёд
return 0;
}
int main() {
clock_t start = clock();
static int matrix[N][N];
for (int i = 0; i < N; i++)
for (int j = 0; j < N; j++)
matrix[i][j] = i + j;
long long sum = 0;
for (int j = 0; j < N; j++) {
for (int i = 0; i < N; i++) {
// 🔮 явный prefetch будущей строки
if (i + PREFETCH_DISTANCE < N) {
_mm_prefetch(
(const char*)&matrix[i + PREFETCH_DISTANCE][j],
_MM_HINT_T0
);
}
sum += matrix[i][j];
}
}
clock_t end = clock();
double cpu_time_used = ((double) (end - start)) / CLOCKS_PER_SEC;
printf("%lld\n", sum);
printf("Процессорное время: %f секунд\n", cpu_time_used);
return EXIT_SUCCESS;
}
gcc -Og -o prefetch prefetch.c && ./prefetch
Процессорное время, такое же как и без оптимизации:
- 0.052012
- 0.058620
Аппаратный prefetcher умнее, чем кажется
Даже при доступе по столбцам современные CPU:
- распознают постоянный stride
- автоматически подтягивают линии в L2/L3
В итоге: _mm_prefetch просто дублирует работу железа
Prefetch обычно делают на сотни байт вперёд, а не на десятки, 8 итераций — это слишком мало.
Cache Associativity. Уровень Кэша (Конфликт полок)
Весь RAM (гигабайты) не может влезть в маленький L1 кэш (32 КБ). Поэтому каждый адрес в памяти жестко привязан к конкретной "полке" в кэше.
Представь, что у тебя кэш L1 имеет 64 "набора". Если вы работаете с двумя огромными массивами, и их размеры — точные степени двойки (например, 4096 байт или 8192), то элементы этих массивов с одинаковыми индексами всегда будут попадать в один и тот же набор кэша.
// В этом случае начало массива B находится ровно через 32768 байт (32 *\times* 1024) после начала A
// Мы выделяем память под два массива
int A[8192]; // 8192 * 4 байта = 32 KB
int B[8192]; // 32 KB
// В памяти они лежат так:
// [ --- Array A (32KB) --- ][ --- Array B (32KB) --- ]
// Адрес A[0]: 0x0000 (условно) -> Полка кэша №0
// Адрес B[0]: 0x8000 (32768) -> Полка кэша №0 (КОНФЛИКТ!)
for (int i = 0; i < 8192; i++) {
sum += A[i] + B[i];
// На каждом шаге B[i] выбивает A[i] из кэша,
// а на следующем круге A[i+1] выбивает B[i].
// Это Cache Thrashing. Скорость падает в разы.
}
Cache Aliasing (наложения в кэше) - процессор при распределении места в кеше учитывает крастность адреса массива своему размеру и если два массива совпадают по размеру и имеют один размер кратный размеру кеша то они конфликтуют за попадание в кеш, что приводит к постоянному выбрасыванию и загрузкой в кеш.
Трюк с "Padding", чтобы конфликта не происходило, можно специально сделать массивы чуть-чуть "неправильного" размера. Вместо a[1024] и b[1024] можно сделать a[1024] и b[1024 + 1]. Это смещает адреса так, чтобы элементы разных строк попадали на разные полки кэша, и конфликта нет.
Баланс: Потеря тактов vs Выигрыш в кэше. Если мы сделаем размер 1025 вместо 1024, мы теряем "реактивную" математику AGU (вместо сдвига << получаем долгое умножение).
Но посмотрим на цифры:
- Потеря на математике: +2 или +3 такта на вычисление адреса
- Выигрыш на кэше: Мы избегаем похода в RAM, который стоит 200-300 тактов
Но можно еще лучше. Чтобы не выбирать между умным AGU и быстрым кэшем:
- Оставляют длину строки равной
a[1024] и b[1024](степень двойки), чтобы AGU считал адрес мгновенно. - Но между самими массивами в памяти вставляют "прокладку" из мусорных байтов (Padding), чтобы их начала не были кратны размеру кэша.
// Мы добавляем небольшую "мертвую зону" между массивами.
// Нам не нужно много — достаточно сдвинуть начало второго массива на одну кэш-линию (64 байта)
// Способ 1: через структуру с "мусором"
struct {
int A[8192]; // 32 KB
char padding[64]; // Прокладка (64 байта мусора)
int B[8192]; // 32 KB
} data;
// Теперь в памяти:
// [ --- Array A --- ][ 64b ] [ --- Array B --- ]
// Адрес A[0]: 0x0000 -> Полка кэша №0
// Адрес B[0]: 0x8040 -> Полка кэша №1 (ПОБЕДА!)
// Способ 2: Просто объявить массив B чуть больше, чем нужно
int A[8192];
int dummy[16]; // Резервируем 64 байта (16 * 4)
int B[8192];
Конечно, включение ассемблерного кода в программу на C делает код зависимым от определенного класса машин (например, x86-64), и поэтому его следует использовать, только когда желаемое действие можно выполнить лишь так и никак иначе.
info
Ассемблер сегодня — это либо для тех, кто копается в "кишках" железа, либо для тех, кому нужно выжать последние капли скорости в математике или графике.
Современные процессоры настолько сложные (конвейеры, предсказатели переходов), что человек, пытаясь "оптимизировать" код вручную, часто делает его медленнее, чем это сделал бы компилятор.
Глава 4. Архитектура процессора
Конвейерная обработка инструкций (instruction pipeline) — это способ организации работы процессора, при котором несколько инструкций выполняются параллельно, но на разных стадиях, чтобы увеличить скорость работы.
Идея простая: процессор не ждёт, пока одна инструкция полностью закончится, а начинает следующую раньше, как на конвейере на заводе.
Даже если инструкция 1 байт, процессор, рассчитанный на 5 стадий, выполняет каждую стадию по такту
Классический 5-ступенчатый конвейер
- Fetch — взять инструкцию из памяти
- Decode — расшифровать инструкцию
- Execute — выполнить операцию
- Memory — доступ к памяти (если нужно)
- Writeback — записать результат в регистр
Без конвейера, инструкции выполняются последовательно по одной, 1 инструкция за 5 тактов:
Такт: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
I1: F D E M W
I2: F D E M W
I3: F D E M W
Или как в многоцикловом выполнении инструкций LEG:
- механизм буферизации/накопление инструкции до нужной разрядности
- Процессор 8-битный читает 1 байт за такт, инструкция занимает 4 байта
Такт: 1 2 3 4 5 6 7 8 9 10 11 12 ...
I1: O A1 A2 R EX
I2: O A1 A2 R EX
I3: O A1 A2 R EX
- O - opcode
- A1 - argument 1
- A2 - argument 1
- R - result address
- EX - выполнение инструкции после того, как все байты собраны
С конвейером, инструкции перекрываются, 1 инструкция за 1 такт:
Такт: 1 2 3 4 5 6 7
I1: F D E M W
I2: F D E M W
I3: F D E M W
После разгона конвейера: на каждом такте завершается одна инструкция. Процессор становится быстрее без увеличения частоты.
Основная проблема конвейера: конфликты (hazards)
- 1. Data hazard (конфликт данных). Когда одна инструкция зависит от результата предыдущей.
- 2. Control hazard (ветвления). При условных переходах процессор не знает какая инструкция будет следующей.
- 3. Structural hazard. Когда двум стадиям нужен один и тот же ресурс.
В конвейерной архитектуре требуется больше регистров чем в последовательных реализациях архитектур, потому что нужно хранить промежуточные данные в pipeline-регистрах между стадиями, так как для завершения инструкции нужно где-то хранить промежуточный результат.
Глава 5. Оптимизация производительности программ
- Ручное раскрытие косвенности
- Наложение (pointer aliasing или memory aliasing)
- Явная функция без побочных эффектов
- Развертывание цикла (loop unrolling)
- Вынос инвариантного кода из цикла
- Устранение избыточных ссылок на память
- Зависимость по данным между записью и последующим чтением (store-to-load forwarding delay)
- Параллелизм на уровне инструкций
- Устранение предсказываний (branch prediction), условное перемещения (conditional move)
Даже лучшим компиляторам могут помешать аспекты поведения программы, блокирующие ее оптимизацию, которые сильно зависят от среды выполнения. Программисты должны "помогать" компилятору, создавая такой код, который легко поддается оптимизации.
Первый шаг в оптимизации программы – устранение ненужной работы, чтобы код выполнял намеченную задачу с максимальной эффективностью. Под этим подразумевается устранение ненужных вызовов функций, условных проверок и обращений к памяти.
Понимая, как работает процессор, мы сможем сделать второй шаг в оптимизации программы и использовать способность процессоров выполнять несколько инструкций параллельно. Мы рассмотрим несколько приемов преобразования программ, помогающих уменьшить зависимости по данным между разными этапами вычислений и уве-личить степень параллелизма.
Изучение ассемблерного кода – один из самых эффективных способов достичь понимания работы компилятора и особенностей выполнения сгенерированного кода. Хорошей стратегией считается сначала тщательно изучить код на наличие в нем вложенных циклов и операций, снижающих производительность, таких как избыточные ссылки на ячейки памяти. Начав с ассемблерного кода, можно предсказать, какие операции будут выполняться параллельно и насколько полно они будут использовать ресурсы процессора. Большинство компиляторов, включая GCC, постоянно совершенствуются, с точки зрения возможностей оптимизации. Поэтому одна из эффективных стратегий состоит в том, чтобы переписать программу и довести ее до такого состояния, когда компилятор сможет сгенерировать оптимальный код.
-
Ручное раскрытие косвенности - когда мы разыменовываем указатель, что бы процессор не искал адрес где взять данные, а сразу сохранял в регистр.
-
Наложение (pointer aliasing или memory aliasing) - два указателя могут ссылаться на одну и ту же ячейку памяти.
Если у меня есть два указателя a и b, компилятор не знает, указывают ли они на разные участки памяти или на один и тот же.
- Если на разные: можно смело кешировать
*aв регистр. - Если на один и тот же: нельзя кешировать, потому что запись через b может изменить значение, которое читает a.
Решение:
- В C ключевое слово
restrict. Приказ компилятору от программиста: "Поверь мне, эти указатели не пересекаются". В Rust встроенный "restrict" через систему владения. - Локальное копирование, снятие алиасинга через копирование
- Если на разные: можно смело кешировать
-
Явная функция без побочных эффектов. Большинство компиляторов не пытаются определить, свободна ли функция от побочных эффектов и пригодна ли для оптимизации. Вместо этого они предполагают худший вариант и оставляют все обращения к функциям нетронутыми.
Поэтому мы должны явно про это написать. В Rust можно указать, что функция не имеет побочных эффектов и она может вызывать только другие const функции:
#![allow(unused)] fn main() { const fn add(x: usize, y: usize) -> usize { x + y } }Если пометить функцию такими атрибутами, компилятор поверит программисту и начнет оптимизировать вызовы. В C нет стандартного способа сказать "моя функция чистая".
-
Развертывание цикла (loop unrolling). В Rust (и C) компилятор часто сам разворачивает простые циклы при сборке с флагом
--release, поэтому писать так вручную сегодня приходится редко.Основная цель развертывания цикла — минимизировать накладные расходы на сам цикл. Развертывание цикла помогает бороться с тем, что называется "управление циклом" (loop overhead). Мы уменьшаем количество прыжков (Jumps) и неверных предсказаний. Увеличение ILP (Instruction-Level Parallelism): Теперь, когда инструкции идут подряд, компилятор может запустить их параллельно на разных исполнительных блоках (ALU) процессора, если они не зависят друг от друга. Но если развернуть слишком сильно, код перестанет помещаться в кэш инструкций L1, и производительность упадет.
/* Функции вычисления накопленной суммы. Эти функции наглядно демонстрируют способы выражения производительности программ */ // Функция psum1 вычисляет один элемент вектора-результата в каждой итерации fn psum1(a: &[f32], p: &mut [f32], n: usize) { if n == 0 { return; } p[0] = a[0]; for i in 1..n { p[i] = p[i - 1] + a[i]; } } /* Функция psum2 применяет метод, известный как развертывание цикла (loop unrolling), чтобы вычислить два элемента в каждой итерации. Если в обычном цикле мы делаем один шаг и проверяем условие, то в "развернутом" мы делаем сразу два, три или более шагов, прежде чем снова проверить условие выхода. * В два раза реже проверяем условие i < n. * В два раза реже увеличиваем i. * Помогаем процессору лучше загрузить его конвейер (pipeline), выполняя несколько операций сложения подряд. */ fn psum2(a: &[f32], p: &mut [f32], n: usize) { if n == 0 { return; } p[0] = a[0]; let mut i = 1; // Цикл с шагом 2, аналогичный i < n-1 while i < n.saturating_sub(1) { let mid_val = p[i - 1] + a[i]; p[i] = mid_val; p[i + 1] = mid_val + a[i + 1]; i += 2; } // Обработка последнего элемента для нечетного n if i < n { p[i] = p[i - 1] + a[i]; } } fn psum4(a: &[f32], p: &mut [f32], n: usize) { if n == 0 { return; } p[0] = a[0]; let mut i = 1; // Основной цикл: обрабатываем по 4 элемента за раз // Условие i < n - 3 гарантирует, что i+3 всегда в границах while i < n.saturating_sub(3) { let v0 = p[i - 1] + a[i]; let v1 = v0 + a[i + 1]; let v2 = v1 + a[i + 2]; let v3 = v2 + a[i + 3]; p[i] = v0; p[i + 1] = v1; p[i + 2] = v2; p[i + 3] = v3; i += 4; } // Добираем оставшиеся элементы (их может быть от 0 до 3) while i < n { p[i] = p[i - 1] + a[i]; i += 1; } } // Перепишите функцию psum1 так, чтобы ей не приходилось многократно извлекать значение p[i] из памяти. // Для этого не требуется использовать развертывание цикла. Мы написали такой код и, // измерив его производительность, получили величину CPE 3.00, // обусловленную задержкой операции сложения чисел с плавающей точкой. fn psum1a(a: &[f32], p: &mut [f32], n: usize) { if n == 0 { return; } /* last_val хранит p[i-1]; val хранит p[i] */ p[0] = a[0]; let mut last_val: f32 = p[0]; let mut val: f32; for i in 1..n { val = last_val + a[i]; p[i] = val; last_val = val; } } fn main(){ let a = vec![1.0, 2.0, 3.0, 4.0, 5.0]; // Создаем пустой вектор такого же размера для результата let mut p = vec![0.0; a.len()]; let n = a.len(); psum2(&a,&mut p, n); println!("{:?}",p); p = vec![0.0; a.len()]; psum1(&a,&mut p, n); println!("{:?}",p); p = vec![0.0; a.len()]; psum4(&a,&mut p, n); println!("{:?}",p); p = vec![0.0; a.len()]; psum1a(&a,&mut p, n); println!("{:?}",p); } -
Вынос инвариантного кода из цикла. Если внутри цикла есть вычисление, результат которого не меняется от итерации к итерации, его нужно вынести до цикла. При вызове рекурсивной функции компилятор сохранит локальное состояние в стеке, что бы при возвращении из рекурсии иметь доступ к корректным значениям локальных переменных которые были до вызова рекурсии. Но и при вызове обычной функции компилятор тоже сохраняет локальное состояние в стек, потому что функция может испортить регистры. Когда компилятор не уверен, что функция безопасна, он консервативно сохраняет все живые регистры. Поэтому нужно выносить вызовы функций из циклов или помечать как "без побочных эффектов". Компиляторы сами пытаются это делать, это называется LICM (Loop Invariant Code Motion)
-
Прямое обращение по индексу
arr[i]в Rust всегда включает проверку границ во время выполнения (runtime bounds checking). Это фундаментальное отличие Rust от C/C++, где такая проверка отсутствует. -
Устранение избыточных ссылок на память. Функция combine4 производительней чем combine3, так как не используем косвенное обращение каждую итерацию. (Сохраняйте в массиве или в глобальной переменной только окончательный результат вычислений.)
fn combine3(v: &Vec<i32>, dest: &mut i32) { for i in v { // компилятор создаст ассемблерные иснтр. которые будут выполянть поиск //по адресу каждую итерацию по два раза - чтения и записи *dest = *dest + i; } } fn combine4(v: &Vec<i32>, dest: &mut i32) { let mut acc = 0; for i in v { acc = acc + i; // нет косвенной адресации } *dest = acc; } // версия с двумя аккумуляторами/накопителями (развертывание цикла 2×2): // Процессор может выполнять acc0 + v[i] и acc1 + v[i+1] параллельно, // потому что они независимы (используют разные регистры). // Это утилизирует несколько функциональных блоков ALU. // Мы преодолели барьер, установленный границей задержки. // Процессору больше не нужно откладывать начало одной операции комбинирования // до завершения предыдущей. fn combine6(v: &Vec<i32>, dest: &mut i32) { let length = v.len(); let limit = length - 1; let mut acc0 = 0; let mut acc1 = 0; let mut i = 0; // Основной цикл: по 2 элемента за итерацию while i < limit { acc0 = acc0 + v[i]; acc1 = acc1 + v[i + 1]; i += 2; } // Обработка последнего элемента если длина нечетная while i < length { acc0 = acc0 + v[i]; i += 1; } *dest = acc0 + acc1; } fn main(){ let a = vec![1, 2, 3, 4, 5]; let mut dest = 0; combine3(&a,&mut dest); println!("{}",dest); dest = 0; combine4(&a,&mut dest); println!("{}",dest); dest = 0; combine6(&a,&mut dest); println!("{}",dest); } -
Барьер производительности — зависимость по данным между записью и последующим чтением (store-to-load forwarding delay). Храните промежуточные значения в регистрах, это поможет компилятору использовать регистры.
Этот код так же имеет зависимость по данным между записью и последующим чтением.
Почему возникает задержка: процессор не может прочитать значение, пока запись полностью не завершится:
- Когда процессор пишет в память, данные отправляются в store-буфер
- Они еще не попали в кэш L1
- Если следующий код пытается читать этот же адрес:
- Процессор должен дождаться, пока данные "дозреют" в store-буфере
- Или дождаться записи в кэш
fn combine3(v: &Vec<i32>, dest: &mut i32) { for i in v { // Читаем *dest, потом пишем *dest // А на следующей итерации опять читаем то, что только что записали! *dest = *dest + i; } }Еще пример, зависимость по данным между записью и последующим чтением:
- Предположим, что a – массив с длиной 1000, инициализированный так, что каждый элемент
a[i]равенi. - Что получится в результате вызова
сору_аггау(a, a+1, 999)?- этот случай
src = a, dest = a+1приведет к зависимости: чтение ждет завершения записи из предыдущей итерации
- этот случай
fn copy_array(src: &[i64], dest: &mut [i64], n: usize) { for i in 0..n { dest[i] = src[i]; } } -
Параллелизм на уровне инструкций. На уровне ассемблерного кода кажется, будто команды выполняются по одной за раз, каждая из них выбирает значения из регистров или памяти, выполняет операцию и сохраняет результаты в памяти или в регистре. Но на самом деле процессор выполняет сразу несколько команд – это явление называется параллелизмом на уровне инструкций. В некоторых архитектурах одновременно могут выполняться 100 и более инструкций. Чтобы обеспечить такое параллельное выполнение с сохранением модели последовательной семантики, используются сложные механизмы.
Зависимости по данным между операциями умножения:

Математически одно и то же, результат одинаковый, но способ вычисления разный.
- Воспользуемся свойством ассоциативности операций для лучшего использования конвейера процессора.
- Процессор может выполнять сложения независимых пар параллельно (используя несколько ALU), а потом сложить результаты. Это сокращает длину критического пути.
fn main(){ let x = 2; let y = 4; let z = 5; let w = 5; // Плохой способ (последовательный): // (x + y) + z + w let a = x + y; let b = a + z; // ждет a (последовательныя операция) let c = b + w; // ждет b (последовательныя операция) println!("{c}"); // Хороший способ (параллельный): // (x + y) + (z + w) let t1 = x + y; // 1. можно одновременно т.е. параллельная операция let t2 = z + w; // 1. можно одновременно т.е. параллельная операция let c = t1 + t2; // 2. потом сложить результаты println!("{c}"); } -
Пишите код, более подходящий для использования инструкций условного перемещения (conditional move).
Классический
if- это условный переход jmp (conditional jump), меняюший поток выполнения:- Вычисляется условие x < 0
- Процессор гадает (branch prediction), пойдет он внутрь
ifили нет:- Если угадал правильно — отлично, конвейер не сбрасывается
- Если не угадал — конвейер сбрасывается, теряются 10–20 тактов (штраф за непредсказанный переход)
fn abs(x: i32) -> i32{ if (x < 0) { x = -x; } return x; }Условное перемещение cmov (conditional move):
- Вычисляются оба значения (
xи-x) - Вычисляется условие
- Одна инструкция cmov (conditional move) выбирает, какое значение записать в результат
- Нет предсказания переходов, нет сброса конвейера!
fn abs(x: i32) -> i32{ let neg_x = -x; return if x < 0 {neg_x} else{ x}; // компилятор может сделать cmov } fn max(a: i32, b: i32) -> i32 { if b > a { b } else { a } // компилятор сделает cmov }Обычный
ifлучше когда:- Выражения дорогие (функции, сложные вычисления)
- Одна ветка выполняется крайне редко
- Нужны побочные эффекты (
println!, мутация)
Когда тернарный оператор не лучше:
#![allow(unused)] fn main() { // Плохо для тернарного оператора: let result = if сложная_функция() > 10 { очень_дорогая_операция() } else { другая_дорогая_операция() }; } -
Перепишите код так, чтобы условный оператор
jmpв первом цикле транслировался в инструкции условного перемещения (cmov).Ветвления, обусловленные сравнением переменных
i1иi2сn, имеют хорошие характеристики прогнозирования – алгоритм прогнозирования ошибается, только когда условия впервые становятся ложными. С другой стороны, сравнение значенийsrc1[i1]иsrc2[i2]крайне непредсказуемо для типичных данных. Это сравнение управляет условным ветвлением, давая на случайных данных величину CPE (когда количество элементов равно 2n) около 15,0.// Традиционная реализация этапа слияния алгоритма сортировки слиянием требует трех циклов. fn merge(src1: &[i64], src2: &[i64], dest: &mut [i64], n: usize) { let mut i1 = 0; let mut i2 = 0; let mut id = 0; while i1 < n && i2 < n { if src1[i1] < src2[i2] { // условный переход jmp (conditional jump) dest[id] = src1[i1]; id += 1; i1 += 1; } else { dest[id] = src2[i2]; id += 1; i2 += 1; } } while i1 < n { dest[id] = src1[i1]; id += 1; i1 += 1; } while i2 < n { dest[id] = src2[i2]; id += 1; i2 += 1; } } fn main(){ let src1 = [1, 3, 5, 7, 9]; let src2 = [2, 4, 6, 8, 10]; let mut dest = [0; 10]; // массив для результата let n = 5; // длина исходных массивов merge(&src1, &src2, &mut dest, n); println!("{:?}", &dest[..10]); }Это еще одна демонстрация, как небольшое изменение стиля программирования может значительно упростить компилятору возможность использования инструкций условного перемещения:
fn merge(src1: &[i64], src2: &[i64], dest: &mut [i64], n: usize) { let mut i1 = 0; let mut i2 = 0; let mut id = 0; while i1 < n && i2 < n { let v1 = src1[i1]; let v2 = src2[i2]; let take1:bool = v1 < v2; id+=1; dest[id] = if take1 {v1} else{ v2}; i1 += take1 as usize; i2 += (1-take1 as usize); } } fn main(){ let src1 = [1, 3, 5, 7, 9]; let src2 = [2, 4, 6, 8, 10]; let mut dest = [0; 10]; // массив для результата let n = 5; // длина исходных массивов merge(&src1, &src2, &mut dest, n); println!("{:?}", &dest[..10]); }
Глава 6. Иерархия памяти

Основная идея иерархии памяти заключается в том, что более быстрое и менее емкое устройство хранения служит кешем для менее быстрого и более емкого устройства уровнем ниже. Иными словами, каждый следующий уровень в иерархии кеширует данные, хранящиеся уровнем ниже.
Для создания более эффективных программ, мы можем порекомендовать:
- сосредоточиться на внутренних циклах, где выполняется большая часть вычислений и обращений к памяти;
- пытаться добиться максимальной пространственной локальности программ путем последовательного чтения данных в том порядке, в каком они хранятся в памяти;
- пытаться добиться максимальной временнóй локальности программ частым использованием данных после того, как они будут прочитаны из памяти.
Процессоры работают намного быстрее, чем память.
Это явление называют "Стеной памяти" (Memory Wall). Современный CPU может выполнять несколько операций за один такт, но ждет данные из оперативной памяти сотни тактов. В это время процессор просто простаивает.
Иерархия памяти в цифрах (примерные значения для современной системы):
| Уровень | Скорость (латентность) | Размер |
|---|---|---|
| Регистры | < 1 такта | < 1 КБ |
| Кэш L1 | ~4 такта | ~32-64 КБ |
| Кэш L2 | ~12 тактов | ~256-512 КБ |
| Кэш L3 | ~40-60 тактов | ~2-64 МБ |
| RAM (Основная) | ~200-300 тактов | Гигабайты |
| SSD (NVMe) | ~10,000-100,000 тактов | Терабайты |
Как программист вы должны понимать иерархическую организацию памяти, потому что она серьезно влияет на производительность приложений. Если необходимые для программы данные хранятся в регистрах процессора, то они будут доступны выполняемой инструкции немедленно. Если данные хранятся в кеше, то для их извлечения потребуется от 4 до 75 циклов синхронизации. Чтобы получить данные из основной памяти, потребуются сотни циклов, а чтобы прочитать с диска – десятки миллионов циклов!
- Локальность данных (Locality): Программа должна обрабатывать данные, которые находятся "рядом" друг с другом в памяти. Если вы читаете массив последовательно, процессор загружает в кэш не один элемент, а целую "линию" (обычно 64 байта), предсказывая, что следующие данные понадобятся скоро.
- Структуры данных:
- Массивы (Arrays) — идеально для кэша. Данные лежат подряд.
- Связные списки (Linked Lists) — катастрофа для кэша. Узлы раскиданы по всей памяти, каждый переход
node->next— это потенциальный промах кэша и обращение к медленной RAM.
- Принцип работы хеш-таблиц: Если хеш-функция распределяет данные хаотично, таблица работает медленно. Если данные лежат компактно — быстро.
Фундаментальная и незыблемая идея любой компьютерной системы заключается в том, что, понимая, как система перемещает данные вверх и вниз по иерархии памяти, можно писать программы так, что они будут хранить свои данные на более высоких уровнях иерархии, обеспечивающих более короткое время доступа.
"Разработка с учетом кэша" (Cache-aware programming). Понимание как данные попадают из SSD в RAM, затем в L3, L2 и, наконец, в L1 и регистры, помогает писать код, который работает в разы (или даже в тысячи раз) быстрее, не меняя при этом алгоритмическую сложность ( остается ).
- Матричные вычисления: Вместо того чтобы идти по матрице по столбцам (хаотичный доступ к памяти), программист идет по строкам (последовательный доступ), гарантируя, что следующая порция данных уже загружена в кэш процессора.
- Структуры данных (Data Oriented Design): Вместо
Array of Structures(массива объектов) программисты часто используютStructure of Arrays(массив данных одного типа, затем массив данных другого типа). Это позволяет процессору загружать в кэш только те данные, которые нужны в данный момент. - Хеширование: Использование "Linear Probing" (открытой адресации) в хеш-таблицах часто быстрее, чем "Chaining" (цепочки), именно потому что элементы лежат в памяти подряд, и кэш работает эффективнее.
Иерархия памяти существует из-за компромисса между скоростью, объемом и стоимостью.
- Регистры процессора: Очень быстрые (1 такт), но стоят огромных денег, поэтому их мало (несколько сотен байт).
- Кэш (L1, L2, L3): Очень быстрые, расположены близко к ядрам процессора, но имеют объем от десятков КБ до десятков МБ.
- Оперативная память (RAM): Достаточно быстрая, но по сравнению с процессором — медленная (сотни тактов ожидания). При этом объемная и доступная по цене.
- SSD/HDD (Диск): Огромная емкость, но чудовищно медленная по сравнению даже с RAM.
Идея в том, что программист (или компилятор) должен стремиться к тому, чтобы данные, с которыми программа работает прямо сейчас, находились максимально близко к процессору (в регистрах или кэше).
Как это выглядит на практике:
Чтобы программа работала быстро, нужно писать код, учитывающий эту иерархию. Это называется локальность обращений (locality of reference).
Есть два ее вида:
А. Пространственная локальность
Если программа обратилась по адресу X, велика вероятность, что она обратится к рядом лежащим адресам (X+1, X+2...).
- Как это использовать: При загрузке одного байта из RAM в кэш, процессор загружает целую "строку кэша" (обычно 64 байта). Если ваш код идет по массиву последовательно (
for i in range(1000): arr[i]), следующие элементы уже будут в кэше. Если же вы прыгаете по случайным адресам, кэш будет постоянно промахиваться, и процессор будет простаивать в ожидании данных из RAM.
Б. Временнáя локальность Если программа обратилась к данным сейчас, велика вероятность, что она обратится к ним же снова в ближайшее время.
- Как это использовать: Если вы используете переменную в цикле, компилятор постарается держать её в регистре, а не сбрасывать в память на каждой итерации.
Суть временнóй локальности заключается в многократном использовании одних и тех же данных. Как только фрагмент данных окажется в кеше после первого промаха, можно ожидать некоторого количества последующих обращений к этим же данным. Кеш работает быстрее, чем устройство хранения уровнем ниже, поэтому эти последующие обращения будут обслуживаться намного быстрее, чем первоначальный промах.
Кеш-памяти, играет роль промежуточного хранилища между процессором и основной памятью, потому что она оказывает наибольшее влияние на производительность программ.
Энергозависимая память память с произвольным доступом (Random Access Memory, RAM), или ОЗУ, выпускается в двух вариантах: статическом и динамическом. Статическая память (Static RAM, SRAM) обладает более высоким быстродействием, но и стоит дороже, чем динамическая память (Dynamic RAM, DRAM). SRAM используется как кеш-память, которая встраивается в сам процессор и/или размещается на материнской плате рядом с ним. DRAM используется в роли основной памяти и буфера графической системы.
SRAM хранит каждый бит в бистабильной (с двумя устойчивыми состояниями) ячейке памяти. Каждая ячейка реализуется в виде цепи из шести транзисторов. Эта цепь обладает способностью бесконечно долго поддерживать любой из двух уровней напряжения, которые называют состояниями. Любое промежуточное состояние будет неустойчивым: попав в него, цепь быстро перейдет в одно из устойчивых состояний. В отличие от DRAM, обновлять их необязательно. Память SRAM не восприимчива к таким возмущениям, как свет и электрические помехи. Но для каждой ячейки SRAM требуется больше транзисторов, чем для ячейки DRAM, их нельзя разместить так же плотно, как ячейки DRAM, поэтому память получается более дорогостоящей и потребляет больше электроэнергии.
DRAM хранит каждый бит как заряд конденсатора. Конденсатор имеет очень маленькую емкость, порядка 30 фемтофарад (30×10–15 фарад). Память DRAM допускает возможность очень плотного размещения ячеек, каждая из которых состоит из конденсатора и одного транзистора. В отличие от SRAM, ячейки памяти DRAM очень чувствительны к любым возмущениям. При изменении напряжения конденсатор не сможет сам восстановить его. На самом деле светочувствительные матрицы в цифровых фотоаппаратах и видеокамерах являются массивами ячеек DRAM. Из-за естественных причин ячейки DRAM разряжаются в течение порядка 10–100 мс. К счастью, для компьютеров, в которых длительность циклов синхронизации измеряется наносекундами, этот факт не является существенным. Система памяти периодически обновляет хранимые биты, читая и перезаписывая их. В некоторых системах также применяются технологии хранения с исправлением ошибок, когда в каждое компьютерное слово добавляется несколько дополнительных битов (например, 32-битное слово быть представлено 38 битами), с помощью которых схема может выявить и исправить любой одиночный ошибочный бит в слове.
Энергонезависимая память. Существует множество типов энергонезависимой памяти. По историческим причинам они носят общее название постоянной памяти (Read-Only Memory, ROM), хотя некоторые типы ROM позволяют не только читать информацию, но и записывать.
- Программируемую постоянную память (Programmable ROM, PROM) можно запрограммировать только один раз.
- Стираемая программируемая постоянная память (Erasable Programmable ROM, EPROM) имеет прозрачное кварцевое окошко, через которое ячейки можно облучить ультрафиолетовым светом. Информация в ячейках EPROM стирается при попадании на них ультрафиолетовых лучей через окошко. Можно запрограммировать до 1000 циклов.
- Флеш-память – это разновидность энергонезависимой памяти на базе EEPROM, которая стала важнейшей технологией хранения данных.Твердотельный диск (Solid State Disk, SSD), – более быструю, более надежную и менее энергоемкую альтернативу обычным вращающимся дискам. Но с недостатком по сравнению с вращающимися дисками - износ блоков флеш-памяти при перезаписи.
Часть II Выполнение программ в системе
Глава 7. Связывание
Связывание (компоновка) – это процесс сборки и объединения различных частей программного кода и данных в единый файл, который можно загрузить в память и запустить на выполнение. Связывание может выполняться во время компиляции – после трансляции исходного кода в машинный; во время загрузки – сразу после загрузки программы в память загрузчиком; и даже во время выполнения. В ранних компьютерных системах связывание выполнялось вручную. В современных системах это делается автоматически – специальными программами, которые называются редакторами связей, или компоновщиками.
Вопросы компоновки плохо освещены в компьютерной литературе. Компоновка охватывает такие области знаний, как компиляция, компьютерная архитектура и операционные системы, поэтому для ее понимания требуется знать особенности генерирования объектного кода, программирования на машинном языке, реализации программ и виртуальной памяти. Компоновка не вписывается ни в одну из обычных специальностей в области компьютерных систем, и потому типичные вопросы, возникающие в этой сфере, недостаточно хорошо освещены в литературе.
...
Драйверы компиляторов.
7.2. Статическое связывание.
7.3. Объектные файлы ELF.
7.4. Перемещаемые объектные файлы.
7.5. Идентификаторы и таблицы имен.
7.6. Разрешение ссылок.
7.7.
Перемещение.
7.8. Выполняемые объектные файлы.
7.9. Загрузка выполняемых объектных файлов.
7.10.Динамическое связывание с разделяемыми библиотеками.
7.11.Загрузка и связывание с разделяемыми библиотеками из приложений.
7.12.Перемещаемый программный код.
7.13.Подмена библиотечных функций.
7.14.Инструменты для управления объектными файлами.
Toolchain: ... разобраться как работает линковщик (Linker) и загрузчик (Loader), формат файлов ELF
Подмена библиотечных функций
Компоновщики Linux поддерживают мощную методику подмены библиотечных функций (library interpositioning), которая позволяет перехватывать вызовы библиотечных функций и вместо них выполнять свой код. Используя методику подмены, можно, например, подсчитать, сколько раз вызывалась конкретная библиотечная функция, проверить ее аргументы и результат и даже заменить ее совершенно другой реализацией.
Вот основная идея: для некоторой целевой функции, вызов которой нужно перехватить, создается функция-обертка с прототипом, идентичным прототипу целевой функции. Затем, используя определенный механизм подмены, вы обманываете систему, заставляя ее вызывать функцию-обертку вместо целевой функции. Функция-обертка обычно выполняет свою логику, а затем вызывает целевую функцию и передает возвращаемое ею значение обратно вызывающему коду.
Подмена может происходить во время:
- компиляции;
- компоновки;
- выполнения, когда программа загружается и выполняется;
Подмена во время компиляции
Чтобы выполнить подмену во время компиляции, необходимо иметь доступ к файлам с исходным кодом программы.
Наша цель – использовать механизм подмены для отслеживания вызовов malloc и free во время работы программы.
Локальный заголовочный файл malloc.h сообщает препроцессору, что тот должен заменить все вызовы целевой функции вызовом ее обертки.
File substitution/malloc.h:
// substitution/malloc.h
#define malloc(size) mymalloc(size)
#define free(ptr) myfree(ptr)
#include <stdio.h>
void *mymalloc(size_t size);
void myfree(void *ptr);
File substitution/main.c:
// substitution/main.c - тестируемый код
#include <stdio.h>
#include <malloc.h>
#include <stdlib.h>
#include <stdint.h>
int main(){
int32_t *p = malloc(8 * sizeof(*p));
if (p == NULL) {
fprintf(stderr, "Ошибка выделения памяти\n");
return EXIT_FAILURE;
}
free(p);
return EXIT_SUCCESS;
}
File substitution/mymalloc.c:
// substitution/mymalloc.c - обверткаа для malloc
#ifdef COMPILETIME
#include <stdio.h>
#include <malloc.h> // стандартный заголовочный файл !!!
/* Функция-обертка для malloc */
void *mymalloc(size_t size){
void *ptr = malloc(size);
printf("malloc(%d)=%p\n", (int)size, ptr);
return ptr;
}
/* Функция-обертка для free */
void myfree(void *ptr){
free(ptr);
printf("free(%p)\n", ptr);
}
#endif
Compilation:
- Подмена обеспечивается параметром
-I.- Аргумент (точка) которого требует от препроцессора C искать заголовочные файлы (в том числе и malloc.h) сначала в текущем каталоге, а затем в обычных системных каталогах.
cd substitution/
gcc -DCOMPILETIME -c mymalloc.c
gcc -I. -o main.out main.c mymalloc.o
./main.out
-------------------------------------
malloc(32)=0x56d12c8dc2a0
free(0x56d12c8dc2a0)
Подмена во время компоновки
Для подмены во время компоновки необходимо иметь доступ к перемещаемым объектным файлам.
Файлы substitution/main.c и substitution/malloc.h не изменились.
File substitution/mymalloc.c:
// substitution/mymalloc.c - обверткаа для malloc
#ifdef LINKTIME
#include <stdio.h>
void *__real_malloc(size_t size);
void __real_free(void *ptr);
/* Функция-обертка для malloc */
void *__wrap_malloc(size_t size){
void *ptr = __real_malloc(size); /* Вызов malloc из libc */
printf("malloc(%d) = %p\n", (int)size, ptr);
return ptr;
}
/* Функция-обертка для free */
void __wrap_free(void *ptr){
__real_free(ptr); /* Вызов free из libc */
printf("free(%p)\n", ptr);
}
#endif
Compilation:
- Статический компоновщик Linux поддерживает подмену во время компоновки, предлагая для этого флаг
--wrap f. Этот флаг требует от компоновщика разрешать ссылки на имяfкак на__wrap_f(два символа подчеркивания в начале) и ссылки на имя__real_f(два символа подчеркивания в начале) как наf. - Параметр
-Wl, optionпередает свой аргументoptionкомпоновщику. Запятые вoptionзаменяются пробелами. То есть параметр-Wl,--wrap,mallocпередаст--wrap mallocкомпоновщику, аналогично сработает параметр-Wl,--wrap,free.
# компиляция исходных файлов в перемещаемые объектные файлы
gcc -DLINKTIME -c mymalloc.c
gcc -c main.c
# компиляция объектных файлов в выполняемый модуль
gcc -Wl,--wrap,malloc -Wl,--wrap,free -o main.out main.o mymalloc.o
./main.out
-------------------------------------
malloc(32) = 0x5aaf751152a0
free(0x5aaf751152a0)
Подмена во время выполнения
Для подмены во время выполнения достаточно иметь доступ только к выполняемому объектному файлу. Этот удивительный механизм основан на переменной окружения LD_PRELOAD динамического компоновщика.
Если в переменной окружения LD_PRELOAD задать список путей к разделяемым библиотекам (через пробелы или двоеточие), то при загрузке и выполнении программы динамический компоновщик (LD-LINUX.SO) сначала будет искать библиотеки в каталогах, перечисленных в LD_PRELOAD, и только потом в других стандартных каталогах.
С помощью этого механизма можно перехватить вызов любой функции в любой библиотеке, включая libc.so, во время загрузки и в ходе выполнения любого выполняемого файла.
Вызов dlsym возвращает указатель на целевую функцию в libc. Затем обертка вызывает целевую функцию, выводит свою информацию и возвращает значение, полученное от целевой функции.
Файлы substitution/main.c и substitution/malloc.h не изменились.
File substitution/mymalloc.c:
// substitution/mymalloc.c - обверткаа для malloc
#ifdef RUNTIME
#define _GNU_SOURCE
#include <stdio.h>
#include <stdlib.h>
#include <dlfcn.h>
#include <unistd.h>
#include <string.h>
// Флаг для предотвращения рекурсии
static int in_hook = 0;
/* Функция-обертка для malloc */
void *malloc(size_t size) {
static void *(*real_malloc)(size_t) = NULL;
// Инициализация указателя на настоящий malloc
if (!real_malloc) {
real_malloc = dlsym(RTLD_NEXT, "malloc"); /* Получить адрес malloc в libc */
}
void *ptr = real_malloc(size);
// Если мы уже внутри хука (вызвано из printf), просто возвращаем указатель
if (in_hook) return ptr;
in_hook = 1;
// Используем fprintf(stderr), он чуть безопаснее, но в идеале — write()
fprintf(stderr, "malloc(%zu) = %p\n", size, ptr);
in_hook = 0;
return ptr;
}
void free(void *ptr) {
static void (*real_free)(void *) = NULL;
if (!real_free) {
real_free = dlsym(RTLD_NEXT, "free"); /* Получить адрес free в libc */
}
if (ptr) {
real_free(ptr); /* Вызвать free из libc */
if (!in_hook) {
in_hook = 1;
fprintf(stderr, "free(%p)\n", ptr);
in_hook = 0;
}
}
}
#endif
Compilation:
# собрать разделяемую библиотеку, содержащую функции-обертки
gcc -DRUNTIME -shared -fpic -o mymalloc.so mymalloc.c -ldl
# компиляция основной программы
gcc -o main.out main.c
# запустить программу в командной оболочке bash
LD_PRELOAD="./mymalloc.so" ./main.out
-------------------------------------
malloc(32) = 0x5d771800c2a0
free(0x5d771800c2a0)
Обратите внимание, что с помощью LD_PRELOAD можно подменить вызовы библиотечных функций из любых программ!
# вызов стандартной библиотеки uptime
➜ substitution /usr/bin/uptime
15:52:50 up 2 days, 16:56, 1 user, load average: 1,58, 2,05, 1,57
# вызов стандартной библиотеки uptime с подменой библиотечных функций malloc и free
➜ substitution LD_PRELOAD="./mymalloc.so" /usr/bin/uptime
malloc(37) = 0x5a8c64a802a0
malloc(5) = 0x5a8c64a802d0
free(0x5a8c64a802d0)
...
malloc(1024) = 0x5a8c64a82790
15:53:14 up 2 days, 16:56, 1 user, load average: 1,27, 1,93, 1,54
free(0x5a8c64a82790)
В системе Linux имеется множество утилит, которые помогут вам исследовать объектные файлы и управлять ими.
- AR – создает статические библиотеки, вставляет, удаляет, перечисляет и извлекает элементы.
- STRINGS – выводит все печатаемые строки, имеющиеся в объектном файле.
- STRIP – удаляет таблицу имен из объектного файла.
- NM – перечисляет имена, определенные в таблице имен объектного файла.
- SIZE – перечисляет имена и размеры секций в объектном файле.
- READELF – показывает полную структуру объектного файла, включая информацию в заголовке ELF. Обладает возможностями утилит SIZE и NM.
- OBJDUMP – основа всех инструментов для работы с двоичными файлами. Может отобразить всю информацию об объектном файле. Чаще всего используется для дизассемблирования двоичного кода в секции
.text. - LDD – перечисляет разделяемые библиотеки, необходимые выполняемому файлу во время выполнения.
Глава 8. Управление исключениями
Передача управления по исключению (Exceptional Control Flow, ECF)
Удивительно ясное описание ядра Linux, включая детали реализации процессов и сигналов, можно найти в книге Даниэля Бовета и Марко Чезати называется "Understanding the Linux Kernel" (в русском переводе — "Ядро Linux")
В обычном состоянии процессор выполняет инструкции последовательно. ECF — это нарушение этой последовательности.
Суть: Система проектируется так, чтобы уметь реагировать на непредсказуемые события (нажатие кнопки, деление на ноль, приход сетевого пакета), мгновенно меняя вектор выполнения программы, но сохраняя при этом общую стабильность, выполняя скачкообразные переходы и тем самым меняя направление потока управления. Такие скачкообразные переходы называются передачей управления по исключению (Exceptional Control Flow, ECF).
Передача управления по исключению – это базовый механизм реализации конкурентного выполнения в компьютерных системах.
Передача управления по исключению (ECF) может происходить на любом уровне компьютерной системы.
1. Низкоуровневые исключения (Аппаратный уровень)
Здесь управление передается от текущей инструкции к обработчику исключений (exception handler) в ядре операционной системы. Это происходит в ответ на события в процессоре.
- Прерывания (Interrupts): Сигналы от внешних устройств (нажали клавишу, пришел пакет данных по сети). Процессор буквально "замирает", перескакивает на код обработки события и возвращается обратно.
- Ловушки (Traps): Преднамеренные исключения. Самый важный пример — системные вызовы (system calls). Когда программе нужно прочитать файл, она делает "скачок" в пространство ядра.
- Ошибки (Faults): Непреднамеренные, но потенциально исправимые. Например, Page Fault (ошибка страницы): когда данных нет в оперативной памяти, процессор переходит в ОС, та подгружает данные с диска, и программа продолжает работу как ни в чем не бывало.
- Сбои (Aborts): Неисправимые ошибки (например, аппаратный сбой памяти). Здесь ECF просто завершает работу процесса.
2. Уровень операционной системы (Процессы)
На этом уровне ECF реализуется через механизмы переключения контекста.
- Контекстное переключение: ОС решает прервать выполнение одного процесса и передать управление другому. Для программы это выглядит как внезапная остановка и последующее возобновление.
- Сигналы: ОС может послать процессу сигнал (например,
SIGINTпри нажатии Ctrl+C). Это заставляет поток управления "прыгнуть" из текущей точки программы в функцию-обработчик сигнала.
3. Уровень прикладного ПО (Языки программирования)
Это те самые try-catch-throw, о которых мы говорили ранее. В системном программировании на C это также реализуется через функции setjmp и longjmp.
- Это позволяет "перепрыгнуть" через десятки вложенных вызовов функций (размотать стек) сразу в то место, где знают, как обработать аномалию.
tip
Интересно, что все эти взаимодействия приложений с операционной системой, тесно связаны с передачей управления по исключению.
Мы опишем различные формы передачи управления по исключению, существующие на разных уровнях компьютерной системы, и начнем с исключений, лежащих на стыке аппаратных средств и операционной системы.
Мы также обсудим системные вызовы, которые являются исключениями, предоставляющие приложениям точки входа в операционную систему.
Затем перейдем на более высокий уровень абстракции и опишем процессы и сигналы, лежащие на стыке прикладных программ и операционной системы.
А в заключение обсудим нелокальные переходы – одну из форм передачи управления по исключению прикладного уровня.
Нелокальные переходы – это форма передачи управления по исключению прикладного уровня.
Обращаясь к setjmp и longjmp. Это "святая святых" управления потоком в языке C. Если обычный return — это вежливый выход из комнаты через дверь, то longjmp — это телепортация из подвала сразу на чердак, минуя все лестничные пролеты (кадры стека).
Чтобы совершить нелокальный переход, программе нужно две вещи: точка сохранения и команда прыжка.
- Точка сохранения
setjmp(jmp_buf env). Эта функция делает "снимок" текущего состояния процессора (указатель стека (SP), указатель на текущую инструкцию (PC или IP), значения важных регистров) и сохраняет его в буфер env. После прыжка программа снова оказывается в setjmp, но на этот раз она возвращает значение val (не ноль). - Прыжок
longjmp(jmp_buf env, int val). Эта функция говорит процессору: "Забудь все, что было после снимка env. Восстанови регистры из буфера и вернись в ту точку, где был вызван setjmp"
Нелокальный переход игнорирует иерархию вызовов. Вы можете находиться внутри 10-й вложенной функции, вызвать longjmp, и стек просто "схлопнется" до первой функции. Это и есть размотка стека (stack unwinding) в её самом первобытном, "диком" виде. Если мы обернем эти функции в красивые обертки, мы получим прообраз try-catch.
Опасности "дикого" перехода (Caveats):
- Утечки ресурсов: Если между setjmp и longjmp вы выделили память (malloc) или открыли файл, они не закроются автоматически. Стек прыгнул, а мусор остался.
- Локальные переменные: Если переменная была изменена в промежутке, её значение после прыжка может быть непредсказуемым (если она не помечена как volatile).
Классы исключений
- Аппаратные прерывания. Причина: Сигнал от устройства ввода/вывода. Поведение при возврате: Всегда возвращает управление следующей инструкции.
- Системное прерывание. Причина: Предусмотренное исключение. Поведение при возврате: Всегда возвращает управление следующей инструкции.
- Сбой. Причина: Потенциально исправимая ошибка. Поведение при возврате: Управление может вернуться текущей инструкции.
- Аварийное завершение. Причина: Фатальная ошибка. Поведение при возврате: Никогда не возвращает управление.
Аппаратные прерывания (interrupt) возникают асинхронно при получении сигналов от устройств ввода/вывода, внешних по отношению к процессору. Они считаются асинхронными в том смысле, что не вызваны выполнением какой-то конкретной инструкции. Исключения остальных классов (системные прерывания, сбои и аварийное завершение) возникают синхронно, в результате выполнения текущей инструкции. Такие инструкции мы будем называть сбойными инструкциями.
Системные прерывания – это преднамеренные исключения, возникающие в результате выполнения инструкции. Системный вызов выполняется в привилегированном режиме, допускающем выполнение любых команд, и использует стек ядра. Наиболее важной задачей системных прерываний является поддержка процедурного интерфейса между прикладными программами и ядром, так называемого интерфейса системных вызовов. Прикладные программы часто запрашивают услуги у ядра, такие как чтение файла (read), запуск нового процесса (fork), загрузка новой программы (execve) или завершение текущего процесса (exit). Для организации управляемого доступа к таким услугам процессоры предоставляют специальную инструкцию syscall, которая может выполняться прикладными программами, если потребуется послать запрос службе с номером n. В результате выполнения инструкции syscall возникает системное прерывание и вызывается обработчик исключений, который анализирует аргумент и вызывает соответствующую подпрограмму ядра.
Сбои (fault) являются следствием ошибочных состояний, которые, возможно, можно исправить. Когда возникает сбой, процессор передает управление обработчику ошибок. Если обработчик в состоянии исправить ошибку, то возвращает управление инструкции, вызвавшей сбой, выполняя ее повторно. В противном случае управление передается ядру – подпрограмме abort, которая завершает работу прикладной программы, вызвавшей сбой.
Процессы
Исключения – это один из тех "кирпичиков", которые используются для воплощения и развития одной из самых успешных идей в информатике – концепции процесса. Когда современная вычислительная система запускает программу, она создает иллюзию, что эта программа – единственная выполняющаяся в текущий момент. С точки зрения программы все выглядит так, будто она монопольно распоряжается процессором и памятью, и процессор выполняет инструкции в программе одну за другой, без всяких прерываний.
Иллюзия: "Процессор принадлежит только мне, и я выполняю свои инструкции одну за другой без пауз".
Реальность: На самом деле процессор переключается (Context Switch) между сотнями процессов тысячи раз в секунду. Это и есть Exceptional Control Flow (ECF) на уровне ядра.
Сохранение состояния: Ядро сохраняет текущие значения регистров, счетчик команд () и указатель стека в специальную структуру (Process Control Block).
Бесшовность: Когда очередь снова доходит до вашей программы, ОС восстанавливает состояние. Программа "просыпается" и продолжает работу с той же инструкции, даже не подозревая, что её прерывали.
Иллюзия: "У меня есть прямой доступ к огромному массиву памяти (например, от до ), и никто другой не может туда заглянуть".
Реальность: Программа работает с виртуальными адресами. Физическая память (RAM) на самом деле фрагментирована и перемешана между всеми процессами. Трансляция: Каждый раз, когда программа обращается к адресу 0x12345, MMU (Memory Management Unit) "на лету" переводит его в реальный адрес в чипе памяти.
Защита: Если программа попытается обратиться к адресу, который ей не принадлежит, процессор сгенерирует исключение — тот самый Segmentation Fault или Page Fault. Это механизм ECF, предотвращающий хаос.
Многозадачность: Благодаря прерываниям и ECF, мы можем слушать музыку, пока компилируется код.
Традиционно процесс определяется как экземпляр выполняющейся программы. Процесс – это конкретный экземпляр программы в стадии выполнения; программа всегда исполняется в контексте некоторого процесса. Каждая программа в системе выполняется в контексте некоторого процесса. Контекст определяется некоторой структурой и позволяет программе выполняться правильно. Эта структура включает программный код и данные, хранящиеся в памяти, стек программы, содержимое ее регистров общего назначения и счетчика инструкций, переменные окружения и набор дескрипторов открытых файлов. Каждый раз, когда пользователь запускает программу, вводя в командной строке имя выполняемого объектного файла, командная оболочка создает новый процесс и запускает выполняемый объектный файл в контексте этого нового процесса.
Ядро операционной системы реализует многозадачность, используя высокоуровневую форму передачи управления по исключению, известную как переключение контекста (Context Switch). Механизм переключения контекста основывается на низкоуровневом механизме исключений.
Для каждого процесса ядро поддерживает контекст – структуру с информацией о состоянии, которую ядро должно восстановить при возобновлении прерванного процесса. Эта структура включает, например, регистры общего назначения, регистры с плавающей точкой, счетчик инструкций, пользовательский стек, регистры флагов, стек ядра и различные структуры ядра, такие как таблицу страниц, определяющую структуру адресного пространства; таблицу процессов с информацией о текущем процессе, таблицу файлов с информацией о файлах, открытых процессом.
В определенные моменты ядро может решить прервать текущий процесс и возобновить выполнение другого процесса, прерванного ранее. Такое поведение называется планированием и осуществляется благодаря программному коду в ядре, который называют планировщиком. Когда ядро выбирает новый процесс для запуска на выполнение, мы говорим, что ядро планирует этот процесс. После того как ядро запланирует новый процесс, оно прерывает текущий процесс и передает управление новому процессу, используя механизм переключения контекста, который сохранит контекст текущего процесса, восстановит сохраненный контекст возобновляемого процесса и передаст управление этому процессу.
В языке C. Функция
forkзапускает ту же самую программу в новом дочернем процессе – полную копию родителя.Функция
execveзагружает и запускает новую программу в контексте текущего процесса. Несмотря на то что она затирает адресное пространство текущего процесса, эта функция не порождает нового процесса. Новая программа по-прежнему получает PID дочернего процесса и наследует все дескрипторы файлов, которые были открыты к моменту вызова функции execve.
Сигналы
Сигналы — это, по сути, "программные прерывания". Если аппаратное прерывание бьет по процессору, то сигнал "бьет" по процессу.
Это механизм, который позволяет операционной системе или одному процессу буквально вклиниться в логический поток управления другого процесса.
В системе POSIX каждому сигналу соответствует целое число (ID) и стандартное имя (например, SIGINT, SIGKILL, SIGSEGV).
Сигналы это "высокоуровневая" форма ECF. В отличие от setjmp/longjmp, которые работают внутри одного процесса (нелокальный переход в рамках одной памяти), сигналы позволяют взаимодействовать между процессами и ядром.
Проблема программирования конкурентных потоков, которые используют одни и те же области памяти, преследует не одно поколение программистов. На первый взгляд кажется, что сигналы — это просто "уведомления", но с точки зрения потока управления, обработчик сигнала ведет себя как временный, внезапный поток, который вклинивается в работу основного кода. Что бы не допустить ошибок конкурентного выполнения (race condition), отсутвия атомарности операций - используйте механизмы ECF для управления сигналами:
- Блокировка сигналов (Masking): Это форма синхронизации. Перед входом в "критическую секцию" кода (где трогать данные опасно), программа говорит ядру: "придержи все сигналы SIGINT в очереди, пока я не закончу". Это эквивалентно захвату мьютекса в многопоточности.
- Async-Signal-Safety: Поскольку обработчик может прервать программу в любой момент, внутри него нельзя использовать функции, которые сами используют блокировки (например, printf или malloc). Если основной поток держит замок внутри printf, а обработчик тоже вызовет printf, возникнет Deadlock (взаимная блокировка) — программа зависнет навсегда.
Инструменты управления процессами
-
STRACE- Выводит трассировку каждого системного вызова, произведенного программой, и ее дочерними процессами. Скомпилируйте вашу программу с параметром-static, чтобы получить более чистую трассировку без вывода информациио системных вызовах, выполненных разделяемыми библиотеками -
PS- Выводит список процессов (включая зомби), присутствующих в настоящее время в системе -
TOP- Выводит информацию об использовании ресурсов текущими процессами -
PMAP- Отображает раскладку памяти процесса -
/proc- виртуальная файловая система, открывающая доступ к большому количеству структур данных в ядре в текстовом формате, доступная для чтения пользовательским программам.текущая средняя нагрузка на вашу систему Linux:
cat /proc/loadavg 0.35 0.49 0.45 1/1526 6188110.35 0.49 0.45- Первые три числа: Временные интервалы 1/5/15 минут. Это показатели Load Average (средняя нагрузка). Чтобы понять, "тормозит" ли система, нужно знать количество ядер.# узнать количество ядер nproc 12- 0.35 - За последнюю минуту, ваш процессор загружен всего на 2.9% ().
- 0.49 - За последние 5 минут, загруженность около 4%
- 0.45 - За последние 15 минут, загруженность около 3.7%
1/1526- Четвертое поле: Состояние потоков. Дробь, описывающая текущую активность планировщика:- 1 (числитель) — количество потоков управления (процессов), которые активны в данный момент (исполняются процессором прямо сейчас).
- 1526 (знаменатель) — общее количество существующих потоков в системе (включая спящие, ждущие ввода-вывода и т.д.).
618811- Пятое число: Последний PID
Глава 9. Виртуальная память
Для эффективного управления памятью с минимально возможным количеством ошибок современные системы используют абстракцию оперативной памяти, известную как виртуальная память (Virtual Memory, VM). Виртуальная память – это элегантная композиция взаимодействующих между собой аппаратных исключений, аппаратного преобразования адресов; основной памяти, файлов на диске и программного обеспечения ядра системы, которые обеспечивают каждый процесс большим, однородным и изолированным адресным пространством.
Особенности продуманного механизма виртуальной памяти:
- эффективное использование основной памяти как кеша для адресного пространства, хранимого на диске, когда в основной памяти находятся только активно используемые области, а остальные области перемещаются между диском и основной памятью по мере необходимости;
- простота управления памятью, благодаря которой каждый процесс получает однородное адресное пространство;
- защита адресного пространства каждого процесса от повреждения другими процессами.
Специализированный аппаратный модуль в микросхеме процессора, который называется модулем управления памятью (Memory Management Unit, MMU), в процессе выполнения транслирует виртуальные адреса в физические, используя таблицу преобразования, хранящуюся в основной памяти, которой управляет операционная система.
Представим, что у нас есть:
- Физическая память (RAM): Всего байт. Это наш крошечный склад.
- Виртуальная память (адреса): 64-битная система, которая может сгенерировать адресов (огромное число).
Смысл такого несоответствия кроется в понятии "иллюзия", которую создает MMU (модуль управления памятью) для каждой программы.
Программа требующая 500 байт памяти считает, что у неё есть все 500 байт. Но физически только 256 байт оперативной памяти в данный момент загружено, только та часть программы, которая нужна прямо сейчас. Остальная часть программы хранится на жестком диске (в файле подкачки или swap-разделе). Если программа попытается залезть в ту часть своей виртуальной памяти, которой сейчас нет в физической RAM, MMU это заметит, поднимет тревогу (прерывание), и ОС подгрузит нужный кусок с диска в RAM, вытеснив что-то другое.
Прототип:
const RAM_SIZE: usize = 256; struct MMU { // Физическая память (наш "железный" массив) physical_ram: [u8; RAM_SIZE], } impl MMU { fn new() -> Self { Self { physical_ram: [0; RAM_SIZE] } } // Запись через "виртуальное окно" // page_offset — это место в физической памяти, где начинается память программы fn write_virtual(&mut self, page_offset: usize, virt_addr: usize, data: u8) { let phys_addr = page_offset + virt_addr; if phys_addr < RAM_SIZE { self.physical_ram[phys_addr] = data; } else { panic!("Segmentation Fault: Попытка записи вне физической памяти!"); } } fn read_virtual(&self, page_offset: usize, virt_addr: usize) -> u8 { self.physical_ram[page_offset + virt_addr] } } fn main() { let mut mmu = MMU::new(); // Настройка "таблицы страниц" (упрощенно) // Программа А считает, что её память начинается с 0, но физически она на 0..64 let prog_a_offset = 0; // Программа Б считает, что её память начинается с 0, но физически она на 128..192 let prog_b_offset = 128; println!("--- Работа программ ---"); // Программа А пишет в свой "нулевой" адрес mmu.write_virtual(prog_a_offset, 0, 42); println!("Программа А записала 42 в свой виртуальный адрес 0"); // Программа Б пишет в свой "нулевой" адрес mmu.write_virtual(prog_b_offset, 0, 99); println!("Программа Б записала 99 в свой виртуальный адрес 0"); println!("\n--- Проверка изоляции ---"); let val_a = mmu.read_virtual(prog_a_offset, 0); let val_b = mmu.read_virtual(prog_b_offset, 0); println!("Значение для Программы А (virt 0): {}", val_a); println!("Значение для Программы Б (virt 0): {}", val_b); println!("\n--- Взгляд на физическую RAM ---"); println!("RAM[0]: {} (Здесь живет Программа А)", mmu.physical_ram[0]); println!("RAM[128]: {} (Здесь живет Программа Б)", mmu.physical_ram[128]); }
-
Локальность - "секретный ингредиент", который позволяет виртуальной памяти (и кэшам процессора) работать быстро, даже если физической памяти мало. Если программа обратилась к какому-то адресу в памяти, велика вероятность, что скоро она обратится к нему же или к соседним адресам. Благодаря локальности, MMU удерживает в физической памяти только эти "горячие" страницы, которые загружены в кеш по причине частого использования - временная локальность (Temporal Locality) или близкого расположения - пространственная локальность (Spatial Locality). Если размер рабочего набора превысит размер физической памяти, то в процессе выполнения программы может возникнуть такой нежелательный эффект, как пробуксовка (thrashing), когда страницы непрерывно загружаются с диска и выгружаются на диск.
-
Упрощение совместного использования. В общем случае каждый процесс имеет свои изолированные сегменты кода, данных, динамической памяти и стека, доступные только этому процессу. Однако в некоторых случаях желательно, чтобы процессы могли совместно использовать некоторый программный код и данные. Например, каждому процессу приходится вызывать один и тот же программный код ядра операционной системы, и каждая программа на C вызывает подпрограммы из стандартной библиотеки C, такие как printf. Вместо того чтобы включать отдельные копии ядра и стандартной библиотеки С в каждый процесс, операционная система может организовать совместный доступ нескольких процессов к единственной копии этого программного кода, отображая соответствующие виртуальные страницы в различных процессах в одни и те же физические страницы.
-
Упрощение выделения памяти. Когда программа, выполняющаяся в пользовательском процессе, запрашивает дополнительное пространство в области "динамической памяти" (например, вызовом функции
malloc), операционная система выделяет соответствующее число, скажемk, последовательно размещенных страниц виртуальной памяти и отображает их вkпроизвольных физических страниц, расположенных в произвольном месте в физической памяти. В силу особенностей функционирования таблиц страниц нет необходимости в том, чтобы операционная система выделялаkпоследовательных страниц физической памяти.- Представьте, что у вас в RAM (256 байт) есть два свободных окна: 30 байт в начале и 30 байт в конце. Программа просит выделить ей 60 байт одним куском. ОС говорит: "Хорошо, вот вам виртуальный массив (последовательных адресов) на 60 байт". Она отдает первые 30 физических байт и последние 30 физических байт. Программа пишет в
array[31], иMMUмгновенно перебрасывает этот запрос в конец физической памяти.
- Представьте, что у вас в RAM (256 байт) есть два свободных окна: 30 байт в начале и 30 байт в конце. Программа просит выделить ей 60 байт одним куском. ОС говорит: "Хорошо, вот вам виртуальный массив (последовательных адресов) на 60 байт". Она отдает первые 30 физических байт и последние 30 физических байт. Программа пишет в
Отображение в память
Система Linux инициализирует содержимое области виртуальной памяти, связывая их с объектами (файлами) на диске. Этот процесс называется отображением в память (memory mapping).
Виртуальная память обладает большими возможностями. Она дает приложениям широкие возможности выделять и освобождать фрагменты памяти, отображать их в файлы на диске, совместно использовать несколькими процессами. Например, знаете ли вы, что можно читать или изменять содержимое файла на диске, читая и изменяя значения в памяти? Или что можно загрузить содержимое файла в память, не выполняя никаких явных операций копирования?
Интересно отметить, что в действительности загрузчик никогда не копирует данные с диска в память. Данные загружаются автоматически и по требованию системы виртуальной памяти при первом обращении к каждой странице, когда процессор пытается извлечь инструкцию для выполнения или данные, на которые ссылается выполняемая инструкция. Такой способ отображения набора смежных виртуальных страниц в произвольное место в произвольном файле известен как отображение памяти. Linux предоставляет системный вызов mmap, с помощью которого прикладные программы могут организовать отображение памяти для своих нужд.
Вы узнаете, как явно управлять виртуальной памятью, используя механизмы отображения памяти и динамического распределения, такие как malloc.
Сама идея отображения в память возникла из четкого понимания, что если систему виртуальной памяти можно интегрировать в стандартную файловую систему, то она сможет обеспечить простой и эффективный способ загрузки программ и данных в память. Любой объект может быть отображен в область виртуальной памяти как совместно используемый (разделяемый) или как закрытый объект. Если процесс отображает разде- ляемый объект в некоторую область своего виртуального адресного пространства, то любое изменение в этой области смогут увидеть все другие процессы, которые тоже отображают этот разделяемый объект в свою виртуальную память. Более того, все из- менения отражаются также на исходном объекте на диске.
Смысл в том, что mmap делает копирование практически мгновенным для больших файлов. mmap вообще не читает файл сразу! Он просто говорит ядру: "если программа обратится к этим адресам, подгрузи данные с диска". А когда write читает эту память, ядро уже само разбирается с диском.
По сравнению с обычным копированием (read/write):
- Данные копируются 4 раза: диск → ядро (read) → пользовательский буфер → ядро (write) → диск
- Нужны системные вызовы для каждого блока
- Для файла размером 1 МБ (1,048,576 байт)
- 1,048,576 / 4096 = 256 итераций
- 256 read + 256 write = 512 системных вызовов
- Для файла 1 ГБ (1,073,741,824 байт):
- read/write: ~524,288 системных вызовов
char buf[4096];
while((n = read(fd_in, buf, sizeof(buf))) > 0)
write(fd_out, buf, n);
mmap копирование:
- mmap экономит тысячи/миллионы переключений между пользователем и ядром.
- Данные копируются 1 раз: диск → память процесса (через mmap)
- Ядро и процесс используют одну и ту же физическую память
- Нет копирования между ядром и пользователем
- Для файла 1 ГБ:
- 3 системных вызова
addr = mmap(...); // 1 вызов
write(stdout, addr, size); // 1 вызов
munmap(addr, size); // 1 вызов
Напишите программу mmapcopy.c, которая использует mmap для копирования дискового файла произвольного размера в стандартный вывод. Программа должна принимать имя входного файла в аргументе командной строки.
mmapcopy.c:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/mman.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <string.h>
int main(int argc, char *argv[]) {
if (argc != 2) {
fprintf(stderr, "Использование: %s <имя_файла>\n", argv[0]);
exit(1);
}
// Открываем файл
int fd = open(argv[1], O_RDONLY);
if (fd == -1) {
perror("open");
exit(1);
}
// Получаем размер файла
struct stat sb;
if (fstat(fd, &sb) == -1) {
perror("fstat");
close(fd);
exit(1);
}
// Проверка на пустой файл
if (sb.st_size == 0) {
close(fd);
return 0;
}
// Отображаем файл в память
char *addr = mmap(NULL, sb.st_size, PROT_READ, MAP_PRIVATE, fd, 0);
if (addr == MAP_FAILED) {
perror("mmap");
close(fd);
exit(1);
}
// Файловый дескриптор больше не нужен
close(fd);
// Записываем в stdout
if (write(STDOUT_FILENO, addr, sb.st_size) != sb.st_size) {
perror("write");
munmap(addr, sb.st_size);
exit(1);
}
// Освобождаем память
munmap(addr, sb.st_size);
return 0;
}
// gcc -o mmapcopy mmapcopy.c
// ./mmapcopy input.txt # вывод в терминал
Динамическое распределитение памяти
Реализация механизма динамического распределителя памяти - критично для системного программирования и разработки высоконагруженных приложений, где стандартные аллокаторы не справляются.
Главный недостаток стандартного аллокатора — это его универсальность. Он создан, чтобы быть "палкой-выручалкой" для всех возможных сценариев работы программы, но плата за это — неоптимальная производительность и предсказуемость в каждом конкретном случае:
- Медленная работа с большим количеством мелких объектов. Если программа постоянно создает и удаляет множество мелких объектов (например, в играх или при работе со связными списками), накладные расходы на поиск подходящего свободного блока и служебные структуры становятся огромными. Специализированный пул объектов фиксированного размера справится с этой задачей на порядки быстрее.
- Проблемы в многопоточных приложениях: Чтобы быть thread-safe, стандартный malloc вынужден использовать блокировки. В активно работающем многопоточном приложении это превращается в "бутылочное горлышко" — потоки простаивают в очередях, ожидая доступа к распределителю. Специализированные решения (как jemalloc или tcmalloc) используют локальные для потока арены, что практически устраняет конкуренцию.
- Фрагментация памяти. Со временем, из-за хаотичных выделений и освобождений блоков разного размера, память превращается в "швейцарский сыр"
- Внешняя фрагментация: Свободной памяти много, но она разбита на маленькие кусочки, разбросанные по всей области. Из-за этого запрос на выделение даже среднего блока может не выполниться, так как нет непрерывного участка нужного размера.
- Внутренняя фрагментация: Возникает из-за необходимости выравнивания и округления размера блока. Например, если аллокатор работает со степенями двойки, запрос на 35 байт может получить блок на 48 или 64 байта. "Лишние" байты пропадают впустую.
- Недетерминированность: В системах реального времени (Real-Time Operating Systems, RTOS), где каждая микросекунда на счету, катастрофой является ситуация, когда время выполнения операции невозможно предсказать. Стандартный malloc именно так и работает: он может вернуть блок за несколько тактов, а может начать сложную процедуру поиска, объединения свободных блоков или даже обратиться к операционной системе за новой памятью
- Риск полного отказа: В любой момент malloc может вернуть NULL, если память закончилась или фрагментация достигла критического уровня. Для критически важных систем (медицина, автопилот) это неприемлемо
- Отсутствие контроля над локальностью данных. Стандартный аллокатор разбрасывает связанные данные по разным участкам памяти. Для процессора это катастрофа, так как он постоянно промахивается мимо кэша (cache miss), что в десятки и сотни раз замедляет работу. Специализированный аллокатор может разместить данные, которые обрабатываются вместе, рядом друг с другом, обеспечивая максимальную эффективность кэширования.
Разработка своего аллокатора (Custom Allocator) устраняет недостатки общих аллокаторов для конкретной задачи:
- Линейный аллокатор (Arena): Просто выделяет память последовательно, а освобождает всё разом. Идеально для игровых циклов или обработки запросов
- Аллокатор фиксированных блоков (Pool allocator): Выделяет блоки одного размера. Это очень быстро и практически не вызывает фрагментации
- Аллокатор "друзей" (Buddy allocator): Использует степени двойки для быстрого выделения и объединения блоков (используется в ядре Linux)
- Адаптивный (Segregated Fits): Комбинация пулов для разных размеров. Например, для маленьких объектов (до 64 байт) используем пулы, для средних — списки, для больших — mmap. Так работает большинство современных malloc (glibc, jemalloc, tcmalloc). Это самый популярный гибрид.
- Аллокаторы для конкретных задач:
- Стековый (Stack allocator): Как линейный, но с LIFO-освобождением.
- Кадровый (Frame allocator): Для игр — каждый кадр своя арена, в конце кадра всё сбрасывается.
Аллокатор Doug Lea (dlmalloc) — это улучшенная версия malloc, которая работает быстрее стандартного от K&R/ Керниган (Kernighan) и Ритчи (Ritchie).
Часть III Взаимодействие программ
До сих пор при изучении компьютерных систем мы полагали, что программы выполняются изолированно, с минимумом информации на входе и на выходе. Однако в реальной практике прикладные программы используют службы операционных систем для взаимодействия с устройствами ввода/вывода, а также с другими программами.
Эта часть книги даст вам понимание основных служб ввода/вывода, предоставляемых операционными системами Unix, а также принципов использования этих служб для создания таких приложений, как веб-клиенты и серверы, взаимодействующие друг с другом через интернет. Вы познакомитесь с приемами разработки конкурентных программ, таких как веб-серверы, способных обслуживать сразу несколько клиентов. Разработка конкурентных программ также позволяет эффективнее использовать современные процессоры с многоядерной архитектурой.
Глава 10. Системный уровень ввода/вывода
Ввод/вывод играет ключевую роль в создании и выполнении процесса, и наоборот, создание процесса играет ключевую роль в совместном использовании файлов разными процессами. Таким образом, для понимания ввода/вывода по-настоящему необходимо понимание процессов, и наоборот. Каждый процесс, создаваемый командной оболочкой Linux, начинает существование, имея три открытых файла: стандартный ввод (дескриптор 0), стандартный вывод (дескриптор 1) и стандартный вывод ошибок (дескриптор 2). Заголовочный файл <unistd.h> определяет константы STDIN_FILENO, STDOUT_FILENO и STDERR_FILENO, которые можно использовать взамен явных значений дескрипторов.
Операция ввода копирует данные из устройства ввода/вывода в основную память, а операция вывода – из памяти в соответствующее устройство.
Среда выполнения любого языка программирования предоставляет высокоуровневые средства ввода/вывода. Например, ANSI С предоставляет стандартную библиотеку ввода/вывода с такими функциями, как printf и scanf, выполняющими буферизованный ввод/вывод. Язык C++ предоставляет похожую функциональность в форме перегруженных операторов << (вывод) и >> (ввод).
В системах Linux эти высокоуровневые функции ввода/вывода реализуются с использованием функций ввода/вывода Unix системного уровня, предоставляемых ядром (системные вызовы: read, write, open).
Операции чтения и записи в Linux могут читать/записывать меньше байтов, чем запрошено, и прикладные программы должны учитывать эту особенность и правильно ее обрабатывать. Вместо непосредственного вызова функций ввода/вывода Unix в прикладных программах следует использовать пакет RIO, автоматически обрабатывающий эти ситуации путем многократного выполнения операций чтения и записи до полного переноса всех запрошенных данных.
Используйте функции RIO (Robust I/O) - это библиотека-обёртка для ввода/вывода через сетевые сокеты. К сожалению, стандартная библиотека ввода/вывода страдает некоторыми неприятными проблемами при их использовании для сетевого ввода/вывода:
- Вызов функций ввода вслед за функциями вывода. Функция ввода не может следовать за функцией вывода без промежуточного вызова fflush, fseek, fsetpos или rewind. Функция fflush опустошает буфер, связанный с потоком. Три последние функции используют функцию lseek для переустановки текущей позиции в файле.
- Вызов функций вывода вслед за функциями ввода. Функция вывода не может следовать за функцией ввода без промежуточного вызова fseek, fsetpos или rewind, за исключением случаев, когда функция ввода достигает конца файла.
Эти ограничения вызывают проблемы в сетевых приложениях, потому что использовать функцию lseek с сокетом запрещено.
RIO (Robust I/O):
File rio.h:
#ifndef __RIO_H__
#define __RIO_H__
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#include <unistd.h>
#include <errno.h>
#define RIO_BUFSIZE 8192 // размер внутреннего буфера
// Структура для буферизованного ввода-вывода RIO
typedef struct {
int rio_fd; // файловый дескриптор, связанный с этим буфером
int rio_cnt; // количество байт, оставшихся во внутреннем буфере
char *rio_bufptr; // указатель на следующий байт для чтения из буфера
char rio_buf[RIO_BUFSIZE]; // внутренний буфер (размер 8 КБ)
} rio_t;
// Функции небуферизированного ввода-вывода (чтение/запись ровно N байт)
ssize_t rio_readn(int fd, void *usrbuf, size_t n);
ssize_t rio_writen(int fd, void *usrbuf, size_t n);
// Инициализация структуры буферизированного ввода-вывода
void rio_readinitb(rio_t *rp, int fd);
// Внутренняя функция для буферизированного чтения (статическая, только в этом файле)
static ssize_t rio_read(rio_t *rp, char *usrbuf, size_t n);
// Функции буферизированного ввода-вывода
ssize_t rio_readlineb(rio_t *rp, void *usrbuf, size_t maxlen); // чтение строки
ssize_t rio_readnb(rio_t *rp, void *usrbuf, size_t n); // чтение N байт
#endif // __RIO_H__
File rio.c:
#include "rio.h"
/*
* Читает ровно n байт из файлового дескриптора fd в буфер usrbuf
*/
ssize_t rio_readn(int fd, void *usrbuf, size_t n)
{
size_t nleft = n; // сколько байт еще осталось прочитать
ssize_t nread; // сколько байт прочитали за этот вызов
char *bufp = usrbuf;
while (nleft > 0) {
if ((nread = read(fd, bufp, nleft)) < 0) {
if (errno == EINTR) { // вызов был прерван сигналом
nread = 0; // просто пробуем снова
} else {
return -1; // настоящая ошибка чтения
}
} else if (nread == 0) { // достигнут конец файла (EOF)
break;
}
nleft -= nread; // уменьшаем счетчик оставшихся байт
bufp += nread; // сдвигаем указатель в буфере
}
return (n - nleft); // возвращаем сколько байт реально прочитали
}
/*
* Записывает ровно n байт из буфера usrbuf в файловый дескриптор fd
* Функция гарантирует, что все n байт будут записаны
*/
ssize_t rio_writen(int fd, void *usrbuf, size_t n)
{
size_t nleft = n; // сколько байт еще осталось записать
ssize_t nwritten; // сколько байт записали за этот вызов
char *bufp = (char *)usrbuf;
while (nleft > 0) {
if ((nwritten = write(fd, bufp, nleft)) <= 0) {
if (errno == EINTR) { // вызов был прерван сигналом
nwritten = 0; // пробуем снова
} else { // настоящая ошибка записи
return -1;
}
}
nleft -= nwritten;
bufp += nwritten;
}
return n; // вернули исходное количество байт - всё записали
}
/*
* Инициализирует внутренний буфер RIO для файлового дескриптора fd
*/
void rio_readinitb(rio_t *rp, int fd)
{
rp->rio_fd = fd; // запоминаем дескриптор
rp->rio_cnt = 0; // в буфере пока нет данных
rp->rio_bufptr = rp->rio_buf; // указатель на начало буфера
}
/*
* Внутренняя функция: читает данные с буферизацией
* Обёртка над read() с добавлением внутреннего буфера
*/
static ssize_t rio_read(rio_t *rp, char *usrbuf, size_t n)
{
int cnt;
// Если буфер пуст - заполняем его
while (rp->rio_cnt <= 0) {
rp->rio_cnt = read(rp->rio_fd, rp->rio_buf, sizeof(rp->rio_buf));
if (rp->rio_cnt < 0) { // ошибка чтения
if (errno != EINTR) { // если не просто сигнал
return -1;
}
} else if (rp->rio_cnt == 0) { // достигнут конец файла
return 0;
} else { // успешно прочитали, ставим указатель на начало буфера
rp->rio_bufptr = rp->rio_buf;
}
}
// Берём из буфера не больше, чем запрошено (и сколько есть в буфере)
cnt = n;
if (rp->rio_cnt < n) {
cnt = rp->rio_cnt; // в буфере меньше, чем просят
}
memcpy(usrbuf, rp->rio_bufptr, cnt);
rp->rio_bufptr += cnt; // сдвигаем указатель в буфере
rp->rio_cnt -= cnt; // уменьшаем счётчик доступных байт
return cnt; // возвращаем сколько реально прочитали
}
/*
* Читает одну строку из файла rp (включая завершающий \n)
* Копирует её в usrbuf и добавляет нулевой символ в конец
*/
ssize_t rio_readlineb(rio_t *rp, void *usrbuf, size_t maxlen)
{
int n, rc;
char c, *bufp = usrbuf;
// Читаем по одному символу, пока не встретим \n или не упрёмся в лимит
for (n = 1; n < maxlen; n++) {
if ((rc = rio_read(rp, &c, 1)) == 1) {
*bufp++ = c;
if (c == '\n') { // нашли конец строки
break;
}
} else if (rc == 0) { // конец файла
if (n == 1) {
return 0; // ничего не прочитали, сразу EOF
} else {
break; // уже что-то прочитали, потом EOF
}
} else { // ошибка
return -1;
}
}
*bufp = 0; // добавляем нулевой символ в конец строки
return n; // возвращаем длину строки (с \n)
}
/*
* Читает ровно n байт из файла rp в буфер usrbuf
* Использует буферизованную версию чтения
*/
ssize_t rio_readnb(rio_t *rp, void *usrbuf, size_t n)
{
size_t nleft = n; // сколько байт ещё осталось прочитать
ssize_t nread; // сколько прочитали за этот вызов
char *bufp = usrbuf;
while (nleft > 0) {
if ((nread = rio_read(rp, bufp, nleft)) < 0) {
if(errno == EINTR) { // прервано сигналом
nread = 0; // пробуем снова
} else {
return -1; // настоящая ошибка
}
} else if(nread == 0) { // конец файла
break;
}
nleft -= nread;
bufp += nread;
}
return (n - nleft); // возвращаем сколько реально прочитали
}
Глава 11. Сетевое программирование
Происхождение интернета:
Интернет является примером одного из наиболее успешных взаимодействий правительства, университета и промышленности. Многие факторы повлияли на его успех, но, как нам кажется, наибольшую роль сыграли оказание финансовой поддержки правительством Соединенных Штатов на протяжении 30 лет, а также самоотверженность разработчиков, которую Дейв Кларк (Dave Clarke) охарактеризовал как "простые договоренности и рабочий код".
Семена интернета были посеяны в 1957 г., когда в самый разгар холодной войны Советский Союз потряс весь мир, запустив в космос первый искусственный спутник Земли. В ответ правительство Соединенных Штатов создало Управление перспективного планирования научно-исследовательских работ (Advanced Research Projects Agency, ARPA), перед которым была поставлена задача восстановить лидерство США в науке и технологиях. В 1967 году Лоренс Робертс (Lawrence Roberts) из ARPA опубликовал планы проведения работ по созданию новой сети, получившей название ARPANET (Advanced Research Projects Agency network). Первые узлы ARPANET начали работать в 1969-м. В 1971-м в сети ARPANET существовало уже 13 узлов и появилось первое сетевое приложение – электронная почта.
В 1972 г. Роберт Кан (Robert Kahn) сформулировал общие принципы межсетевого обмена, согласно которым обмен данными между сетями производится посредством независимых черных ящиков, получивших название "маршрутизаторы". В 1974-м Кан и Винтон Серф (Vinton Cerf) опубликовали первый вариант протокола TCP/IP, который к 1982-му стал стандартным протоколом межсетевых взаимодействий для сети ARPANET. С 1 января 1983 г. каждый узел в сети ARPANET был переключен на протокол TCP/IP, эта дата стала днем рождения всемирной сети интернет, функционирующей на базе протокола IP.
В 1985 г. Пол Мокапетрис (Paul Mockapetris) изобрел систему доменных имен DNS (Domain Name System). На тот момент в интернете было уже около 1000 хостов. В следующем году Национальный научный фонд США (National Science Foundation, NSF) построил магистральную сеть NSFNET, соединившую 13 площадок посредством коммутируемых телефонных линий со скоростью передачи данных 56 Кбит/с. Позже в 1988-м были использованы линии связи Т1, обеспечивающие скорость передачи 1,5 Мбит/с, а в 1991-м были использованы линии связи ТЗ, обеспечивающие скорость передачи 45 Мбит/с.
В 1988-м в интернете имелось уже более 50 тыс. хостов. В 1989 г. оригинальная сеть ARPANET официально перестала существовать. В 1995 г., когда в интернете имелось порядка 10 млн хостов, фонд NSF отправил в небытие сеть NSFNET, заменив ее современной сетью интернет с архитектурой, основанной на специализированных коммерческих магистральных сетях, связанных общедоступными точками доступа.
Поскольку интернет-хосты могут иметь разный порядок следования байтов, протокол TCP/IP объявляет единый порядок – сетевой порядок следования байтов (прямой, или big-endian) для любых целочисленных данных, таких как IP-адреса, которые переносятся через сеть в заголовках пакетов. Адреса в структурах IP-адресов всегда хранятся в прямом (сетевом) порядке, даже если аппаратура хоста использует обратный порядок
IP-адрес – это 32-разрядное целое число без знака. Сетевые программы хранят IP-адреса в специальной структуре
// internet address
struct in_addr {
uint32_t s_addr; /* Адрес с сетевым порядком следования байтов (big-endian) */
};
Например, 128.2.194.242 – это десятично-точечное представление адреса 0x8002c2f2
Шестнадцатеричный адрес Десятично-точечный адрес
0x0 0.0.0.0
0xffffffff 255.255.255.255
0x7f000001 127.0.0.1
0xcdbca079 205.188.160.121
0x400c950d 64.12.149.13
0xcdbc9217 205.188.146.23
Узнать адрес собственного компьютера в десятично-точечном представлении:
$ hostname -i
127.0.1.1
$ hostname
jeka
Мы можем изучить некоторые свойства отображений DNS с помощью программы NSLOOKUP в Linux, которая отображает IP-адреса, связанные с доменным именем:
$ nslookup localhost
Server: 127.0.0.53
Address: 127.0.0.53#53
Name: localhost
Address: 127.0.0.1
Name: localhost
Address: ::1
$ nslookup google.com
Server: 127.0.0.53
Address: 127.0.0.53#53
Non-authoritative answer:
Name: google.com
Address: 142.250.178.174
Name: google.com
Address: 2a00:1450:4003:809::200e
Несколько доменных имен могут отображаться в один и тот же набор IP-адресов. DNS сервер просто отдает IP, но веб-сервер (Nginx/Apache) смотрит не только на IP, но и на заголовок Host в HTTP-запросе в котором содержится доменное имя, которое ввел пользователь.
# Пример DNS записей
www.site1.ru → 192.168.1.10
www.site2.ru → 192.168.1.10
www.site3.ru → 192.168.1.10
Когда один домен указывает на несколько IP-адресов.
www.example.com. IN A 192.0.2.1
www.example.com. IN A 192.0.2.2
www.example.com. IN A 192.0.2.3
Это используется для:
- Балансировки нагрузки (DNS Round Robin) — запросы распределяются между серверами
- Отказоустойчивости — если один сервер упал, запросы идут на другой
- Географического распределения — пользователь из Европы получает IP европейского сервера, из Азии — азиатского
Сокет – это конечная точка соединения. Каждый сокет имеет адрес сокета, который состоит из IP-адреса и 16-разрядного целочисленного номера порта2 и обозначается как address:port. Порт в адресе сокета клиента назначается ядром автоматически, когда клиент посылает запрос на соединение, и называется эфемерным портом (ephemeral port). В то же время порт в адресе сокета сервера – это обычно хорошо известный номер порта, присвоенный соответствующей службе. Например, веб-серверы обычно используют порт 80, а серверы электронной почты – порт 25. Каждая служба, которой назначен постоянный хорошо известный порт, имеет хорошо известное имя службы (http, smtp). Соответствия между хорошо известными именами служб и номерами портов определяются в файле /etc/services.
Интерфейс сокетов – это набор функций, использующихся вместе с функциями ввода/вывода Unix для создания сетевых приложений. Он реализован в большинстве современных систем, включая все варианты операционных систем Unix, Windows и Macintosh.
Обобщенная схема использования интерфейса сокетов в контексте обычной транзакции клиент–сервер
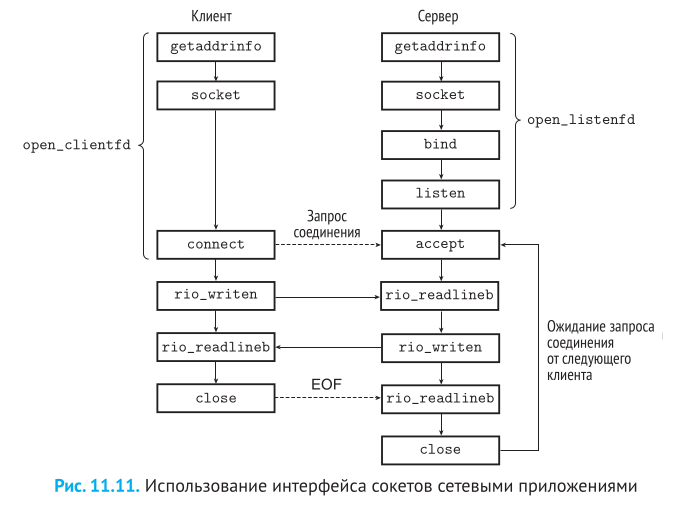
Происхождение Всемирной паутины:
note
Всемирная паутина (World Wide Web) была изобретена Тимом Бернерсом-Ли (Tim Berners-Lee), специалистом по программному обеспечению в швейцарской физической лаборатории Европейский центр ядерных исследований (European Center for Nuclear Research, CERN). В 1989 г. Бернерс-Ли опубликовал в международных научных изданиях заметку с предложением создания распределенной гипертекстовой системы, которая соединяла бы сеть узлов линиями передачи данных. Назначение предложенной системы заключалось в том, чтобы помочь ученым CERN совместно использовать и управлять информацией. Через два с небольшим года после того, как Бернерс-Ли реализовал первый веб-сервер и веб-браузер, была создана небольшая сеть, охватывающая серверы CERN и несколько других сайтов.
В 1993 г. произошло поворотное событие, когда Марк Андриссен (Marc Andreesen; впоследствии основавший компанию Netscape) и его коллеги из Национального центра по применению суперкомпьютеров (National Center for Supercomputing Applications, NCSA) разработали и внедрили графический браузер MOSAIC для всех трех основных платформ: Linux, Windows и Macintosh. С появлением браузера MOSAIC интерес к вебу приобрел характер взрыва, при этом число веб-сайтов ежегодно увеличивалось в 10 и более раз. К 2015 году в мире существовало более 975 млн сайтов (по данным отчета Netcraft Web Survey).
Веб-контент
Для веб-клиентов и веб-серверов контент (содержимое) представляет собой последовательность байтов со связанным с ними типом MIME (Multipurpose Internet Mail Extensions – многоцелевые расширения электронной почты интернета).
Веб-серверы формируют контент для клиентов двумя разными способами:
- читают дисковый файл и возвращают его содержимое клиенту. Дисковый файл – это пример статического контента, а процесс доставки файла клиенту называется обслуживанием статического контента;
- запускают выполняемый файл и возвращают его вывод клиенту. Вывод, произведенный выполняемым файлом, называют динамическим контентом
Каждый элемент контента, возвращаемый веб-сервером, ассоциируется с некоторым файлом, которым управляет этим контентом. Каждый из этих файлов имеет уникальное имя – унифицированный указатель информационного ресурса (Universal Resource Locator, URL). Например, URL http://www.google.com:80/index.html идентифицирует HTML-файл с именем /index.html на хосте www.google.com, который управляется веб-сервером, прослушивающим порт 80.
Транзакции HTTP
Протокол HTTP основан на текстовых строках, передаваемых через соединения, поэтому для выполнения транзакций с любым веб-сервером можно воспользоваться программой TELNET операционной системы Linux. Программа TELNET практически была вытеснена более защищенной программой SSH, однако она остается весьма полезной при отладке серверов, которые общаются с клиентами, передавая текстовые строки. Главное, что нужно знать о TELNET: он передает все данные, включая пароли, в открытом виде, поэтому использовать его для повседневного управления серверами небезопасно.
telnet:
# 1. Диагностика google
telnet google.com 80
# 2. Ввести
# метод URI версия HTTP
# заголовок: данные
GET / HTTP/1.1
Host: google.com
# 3. Нажать два раза Enter, для отправки EOL
# 4. telnet отправит наши заголовки и добавит в конец \r\n
$ telnet google.com 80
Trying 172.217.171.46...
Connected to google.com.
Escape character is '^]'.
GET / HTTP/1.1
Host: google.com
HTTP/1.1 301 Moved Permanently
Location: http://www.google.com/
Content-Type: text/html; charset=UTF-8
Content-Security-Policy-Report-Only: object-src 'none';base-uri 'self';script-src 'nonce-EgHbWQzGJpI1EMtvW_JX4Q' 'strict-dynamic' 'report-sample' 'unsafe-eval' 'unsafe-inline' https: http:;report-uri https://csp.withgoogle.com/csp/gws/other-hp
Reporting-Endpoints: default="//www.google.com/httpservice/retry/jserror?ei=Di-eabyhL923hbIP5cPV2AI&cad=crash&error=Page%20Crash&jsel=1&bver=2383&dpf=2eySzHH2UltlBlr_-T4GaMUfpjVJYXfj34WcxFc92Ng"
Date: Tue, 24 Feb 2026 23:06:54 GMT
Expires: Thu, 26 Mar 2026 23:06:54 GMT
Cache-Control: public, max-age=2592000
Server: gws
Content-Length: 219
X-XSS-Protection: 0
X-Frame-Options: SAMEORIGIN
<HTML><HEAD><meta http-equiv="content-type" content="text/html;charset=utf-8">
<TITLE>301 Moved</TITLE></HEAD><BODY>
<H1>301 Moved</H1>
The document has moved
<A HREF="http://www.google.com/">here</A>.
</BODY></HTML>
Протокол НТТР/1.1 задокументирован в RFC 2616.
- запросы на комментарии (Requests for Comments, RFC) - официальный источник информации об интернете
Обязательный для поддержки список типов MIME
Версия НТТР/1.0, появившаяся на свет в 1996 г. Версия НТТР/1.1 определяет дополнительные заголовки для поддержки дополнительных возможностей, таких как кеширование и безопасность, а также механизм, позволяющий клиенту и серверу выполнять многочисленные транзакции через одно и то же соединение. На практике две указанныевыше версии совместимы, потому что клиенты и серверы, поддерживающие НТТР/1.0, просто игнорируют неизвестные им заголовки НТТР/1.1
Заголовок Host используется прокси-кешами, служащими посредниками между браузером и сервером, где находится требуемый контент. Между клиентом и сервером может находиться множество прокси-серверов. Данные в заголовке Host, который идентифицирует доменное имя оригинального сервера, позволяют прокси-серверу определить кешированную у себя копию запрошенного контента.
Глава 12. Конкурентное программирование
До сих пор конкуренция (concurrency) рассматривалась нами в основном как механизм, используемый ядром для одновременного выполнения множества прикладных программ.
- По событию прерывания включается механизм передачи управления по исключению Exceptional Control Flow (ECF):
- Процессор переключается (Context Switch) между сотнями процессов тысячи раз в секунду
- Ядро сохраняет текущие значения регистров, счетчик команд (PC) и указатель стека в специальную структуру (Process Control Block)
- Когда очередь снова доходит до нужной программы, ОС восстанавливает состояние.
Однако конкуренция не ограничивается ядром. Она может играть важную роль в самих прикладных программах.
Приложения, использующие конкуренцию на уровне прикладных задач, называются конкурентными (concurrency):
- при доступе к медленным устройствам ввода/вывода, приложения могут использовать конкуренцию путем чередования полезных действий с запросами ввода/вывода;
- взаимодействие с пользователями, всякий раз, когда пользователь запрашивает некоторую операцию (например, щелкает кнопкой мыши), для ее выполнения создается отдельный поток управления;
- сокращение задержек путем откладывания выполнения, приложения могут использовать конкуренцию для сокращения времени задержки при выполнении определенных важных операций путем откладывания выполнения других дорогих и не важных операций;
- одновременное обслуживание нескольких сетевых клиентов, когда для обслуживания каждого клиента создается отдельный поток управления. Это позволяет серверу одновременно обслуживать множество клиентов и предотвращать узурпацию сервера одним клиентом;
- организация параллельных вычислений на многоядерных процессорах, использование многоядерных процессоров позволяет выполнять задачи параллельно (parallel);
В современных операционных системах поддерживаются три основных механизма конкуренции:
- процессы – при использовании этого механизма все потоки управления организованы как отдельные процессы, которые планируются и поддерживаются ядром. Поскольку процессы имеют раздельные виртуальные адресные пространства, то для их взаимодействий между собой необходимо использовать специальные механизмы межпроцессных взаимодействий (Interprocess Communication, IPC) это сокеты для разных хостов, а для взаимодейсвия на общем хосте: сигналы, каналы, очереди, разделяемая память System V, семафоры System V. Изолированность адресных пространств процессов является как преимуществом, так и недостатком. Никакой процесс не сможет случайно повредить данные, принадлежащие другому процессу, что избавляет от массы досадных ошибок. Недостаток - меньшая скорость обслуживания клиентов из-за высоких непроизводительных издержек на создание новых процессов и межпроцессные взаимодействия.
- мультиплексирование ввода/вывода – разновидность механизмов конкурентного программирования, когда прикладные программы сами планируют работу своей управляющей логики в контексте одного процесса. Управляющая логика конструируется как конечный автомат, который основная программа явно переводит из одного состояния в другое, например по мере поступления данных из файловых дескрипторов. Поскольку программа выполняется в рамках единственного процесса, все потоки совместно используют одно и то же адресное пространство, что упрощает совместное использование данных потоками и отладку через
GDB; - потоки выполнения – логические потоки управления, выполняющиеся в контексте одного процесса и планируемые ядром. Потоки можно рассматривать как симбиоз двух вышеописанных механизмов: они планируются ядром, подобно процессам, и совместно используют общее виртуальное адресное пространство.
Конкуренция на основе мультиплексирования
Мультиплексирование - это прослушавание одновременно нескольких дескрипторов, при соединении в одном из них происходит обработка его логики (без переключения контекста) согласно его конечного автомата в данный момент, все это в одном процессе. При одновременно двух событиях в разных дескрипторах, они становятся в очередь.
Мультиплексирование - это очередь событий в одном потоке. Процесс превращается в диспетчера, который держит открытыми сотни портов, но обрабатывает только те, где "загорелась лампочка". Если событий несколько, они обрабатываются по очереди, мгновенно переключая внутреннюю логику программы (состояния автомата), что позволяет экономить гигантское количество ресурсов по сравнению с созданием отдельного потока на каждого клиента.
Отличие задач I/O-bound (ввод/вывод) от задач CPU-bound (вычисления). Конкурентный подход с мультиплексированием подходит только для задач I/O-bound, которые являются отсновными в сетевых серверах. Что бы при получении соединения не ждать все это время, пока придут данные от пользователя, так как мы блокируем работу CPU от других пользователей, в подходе с мультиплексированием мы вообще не ждем эти данные пользователя, мы реагируем на событие их прибытия Event-Driven Architecture (событийно-ориентированная архитектура). Суть в том, что в сетевом обмене больше всего время занимает доставка данных, а не их обработка. Так что, за разницу времени между событиями установки соединения с пользователем и доставки на сервер его запроса, мы успеем обработать множество других пользователей, приславших данные раньше чем этот пользователь. К тому же, без мультиплексирования, overhead - сервер будет создавать для каждого запроса свой процесс/поток с "откусыванием" общей памяти и ОС будет тратить кучу сил на переключение между ними (Context Switch), хотя большинство из них просто спят и ничего не делают (данные еще не пришли).
Но для "тяжелых" задач CPU-bound (перекодировать видео), подход с мультиплексированием наоборот, заблокирует всех пользователей в ожидании доступа к CPU. В таких случаях (CPU-heavy) как раз и используют пул потоков или процессы.
В современных системах на Rust (фреймворки типа Axum или Actix) используют гибрид:
- Event Loop (Мультиплексор): Быстро принимает входящие пакеты.
- Worker Pool (Пул потоков): Если пришедший пакет требует "тяжелых" вычислений (например, сжать картинку), мультиплексор не делает это сам. Он "выбрасывает" эту задачу в пул свободных потоков и тут же возвращается слушать порты.
Если вы слышали про Async/Await, то знайте — в их основе лежит именно это мультиплексирование.
- Node.js: Его знаменитый Event Loop — это и есть бесконечный вызов epoll/kqueue. Он один обрабатывает тысячи запросов, просто переключаясь между ними, как только данные готовы.
- Rust (Tokio / Mio): Библиотека Tokio — это стандарт де-факто для асинхронного Rust. Под капотом она использует библиотеку Mio (Metal I/O), которая является тонкой оберткой над тем самым мультиплексированием (epoll)
Недостаток подхода с мультиплексированием в классической уязвимости к атакам типа "отказ в обслуживании" (DoS), а именно - специфической атаки Slowloris.
Проблема заключается в том, что событийный сервер обязан хранить состояние конечного автомата (незавершенные данные) каждого клиента в общей памяти. Злоумышленник может эксплуатировать это, открывая тысячи соединений и присылая данные по "чайной ложке", тем самым потихоньку "выпивая" всю оперативную память сервера и занимая все доступные слоты для подключений, не совершая при этом никакой полезной работы и не закрывая соединения.
Защитные механизмы от атак Slowloris:
- Тайм-ауты (Timeouts): Если от дескриптора не было данных в течение, скажем, 5 секунд, сервер принудительно разрывает соединение и очищает память.
- Ограничение буфера: Запрет на хранение "недострок" длиннее определенного размера.
- Минимальная скорость: Если клиент шлет данные слишком медленно (1 байт в минуту), он считается злоумышленником и отключается.
Конкуренция на основе потоков
Третий механизм конкуренции - потоки выполнения (Threads), взял себе лучшее из двух подходов:
- от механизма на процессах взял планирование ядром и блокирующую логику. Программисту не нужно вручную поддерживать сложные схемы (конечные автоматы). Вы пишете простой код: "Жди данные, а когда придут - работай". Ядро ОС само понимает, когда поток нужно "усыпить", а когда "разбудить", и эффективно распределяет эти задачи по разным ядрам процессора
- от механизма на мультиплексирование взял общее адресное пространство. Потоки живут внутри одного процесса. Им не нужно строить сложные туннели для передачи данных (IPC), как процессам. Они мгновенно обмениваются информацией, просто обращаясь к одной и той же переменной в общей памяти. Взаимодействие через потоки (Mutex/Arc) на порядки быстрее и дешевле, чем через IPC (сигналы, сокеты, пайпы) в процессах.
Преимущество переключения контекста между потоками по сравнению с переключением между процессами. При переключении контекста (Context Switch) в потоке, ядро так же сохраняет состояние текущего исполнителя. Процессор сохраняет значения регистров (RAX, RBX, счетчик команд PC, указатель стека SP) в PCB (Process Control Block). Это всего около сотни байт. Но MMU - таблицы страниц (виртуальное адресное пространство) остаются теми же. Процессору не нужно перенастраивать окна, через которые он смотрит на RAM. Кэш инструкций и кэш данных остаются актуальными, потому что адреса памяти не изменились.
Преимущество общего адресного пространства в одном процессе между всеми его потоками.
- Когда вы работаете с процессами, они разделены стеной MMU. Чтобы Процесс
Aпередал ПроцессуBкартинку размером 10 МБ:- Процесс
Aкопирует эти 10 МБ в специальный буфер ядра ОС. - Процесс
Bкопирует эти 10 МБ из буфера ядра в свою изолированную память. - Итог: Вы потратили время и память на копирование 20 МБ данных.
- Процесс
- Когда вы работает в пределах общего процесса но в разных потоках, обмен данными другой:
- У вас есть картинка 10 МБ, лежащая в куче (Heap) процесса.
- Поток
Aпросто передает ПотокуBадрес этой картинки (указатель). - Поток
Bначинает читать эту картинку по тому же самому адресу. - Итог: Скопировано было всего 8 байт (размер указателя/адреса). Сами данные не перемещались.
Но потоки накладывают на программиста технический долг:
- Из-за общей памяти (Shared State) возможна гонка данных (Race Condition) и взаимная блокировка (Deadlock)
- Ограниченность памяти, каждому потоку ОС выделяет свой кусок памяти под стек, так же при большом количестве существующих потоков, время на переключение (Thrashing) между ними становится фактором ограничения
В современном Rust для работы с потоками есть три уровня инструментов:
- Стандартные потоки (std::thread), это прямая реализация механизм конкуренции на потоках. Проблема общих данных решается через Arc,Mutex
- Чтобы решить проблему лимита памяти (не создавать тысячи потоков), для тяжелых вычислений используют пул потоков - библиотеку Rayon. Она автоматически делит работу между потоками, количество которых равно количеству ядер вашего CPU.
- Современный высоконагруженный Rust (веб-серверы) чаще всего использует библиотеку Tokio. Она объединяет мультиплексирование и потоки:
- Запускается небольшое количество потоков (по числу ядер).
- Внутри этих потоков крутится мультиплексор (Event Loop).
- Когда задача (Future) блокируется на вводе-выводе (I/O), она "засыпает", а поток мгновенно переключается на другую задачу.
Параллельное программирование
Параллельное программирование (Parallelism), когда мы задействуем несколько ядер CPU, мы боремся за то, чтобы потоки не мешали друг другу работать с памятью.
Важный урок параллельного программирования: накладные расходы на синхронизацию обходятся дорого, и их следует по возможности избегать.
Если этого нельзя избежать, накладные расходы должны компенсироваться максимально большим объемом полезных вычислений.
Один из способов избежать операций синхронизации в нашей программе - заставить каждый дочерний поток вычислять сумму своей части последовательности в локальной переменной, которая не используется никакими другими потоками.
Техника Thread-Local Storage (TLS) или просто использование локального стека когда нужно что-то параллельно суммировать.
- Плохой вариант:
- 10 потоков постоянно прибавляют единицу к одной общей переменной COUNTER.
- Результат: Процессор тратит 90% времени на то, чтобы потоки «договорились», кто сейчас пишет, и на обновление кэшей. Это будет медленнее, чем если бы считал один поток!
- Хороший вариант:
- Каждому потоку дают свою локальную переменную local_sum
- Потоки считают миллион операций в своем «личном пространстве» (в регистрах процессора, молниеносно).
- В самом конце, один-единственный раз, они прибавляют свой результат к общему TOTAL_SUM.
- Результат: Синхронизация произошла всего 10 раз вместо 10 миллионов. Накладные расходы почти равны нулю.
Три классические задачи иллюстрирующие проблему ошибок параллелизма (Concurrency Bugs)
Три классические задачи были придуманы (в основном Эдсгером Дейкстрой), чтобы проиллюстрировать, как потоки могут "сломать" друг друга в борьбе за ресурсы.
1. Обедающие философы (Dining Philosophers)
github.com/DeRuina/philosophers
Проблема: Взаимная блокировка (Deadlock). Как не допустить Deadlock (когда все всех ждут).
Пять философов сидят за круглым столом. Между ними лежит по одной вилке (всего 5). Чтобы поесть, философу нужны две вилки — левая и правая.
- Алгоритм: Философ берет сначала левую вилку, потом правую. Поел — положил обратно.
- Катастрофа: Если все пять философов одновременно возьмут левую вилку, они все застынут навсегда. Каждый будет ждать правую вилку, которая в руках у соседа.
- Урок: Нельзя просто так захватывать ресурсы в разном порядке. Нужно либо вводить иерархию ресурсов, либо брать все ресурсы разом ("атомарно").
2. Спящий парикмахер (Sleeping Barber)
Проблема: Состояние гонки (Race Condition) и координация. Как не пропустить сигнал и не уснуть, когда есть работа.
В парикмахерской есть одно кресло для стрижки и несколько кресел в очереди.
- Если клиентов нет, парикмахер садится в кресло и засыпает.
- Если приходит клиент и парикмахер спит — клиент его будит.
- Если парикмахер работает, клиент садится в очередь. Если мест нет — уходит.
- Катастрофа: Представьте, что клиент заходит именно в тот миг, когда парикмахер еще не заснул, но уже решил, что "клиентов нет". Парикмахер ложится спать, а клиент думает, что парикмахер занят, и садится ждать. В итоге: клиент ждет вечно, парикмахер спит вечно.
- Урок: Нужно четко синхронизировать проверку условий ("есть ли кто?") и действие ("лечь спать"), чтобы между ними не проскочило событие.
3. Проблема курильщиков (Cigarette Smokers)

Проблема: Нехватка ресурсов (Starvation) и сложные зависимости. Как управлять сложными комбинациями общих ресурсов.
Есть три курильщика и посредник. Чтобы покурить, нужны три вещи: табак, бумага и спички.
- У 1-го есть только табак. У 2-го — бумага. У 3-го — спички.
- Посредник кладет на стол два случайных ингредиента (например, бумагу и спички).
- Курильщик, у которого есть недостающий третий (табак), должен забрать их и закурить.
- Катастрофа: Если посредник положил бумагу и спички, а их попытаются схватить сразу двое (например, один схватил спички и ждет бумагу), возникнет хаос. Или, если один курильщик всегда быстрее других, остальные никогда не покурят.
- Урок: Сложно координировать процессы, когда им нужно сочетание разных ресурсов. Это решается с помощью сигналов (семафоров), которые оповещают конкретную группу потоков.
В современном Rust эти проблемы решаются через Channels (передача сообщений), Mutex (замки) и Condvar (условные переменные), а компилятор следит, чтобы вы не наделали глупых ошибок с памятью.